Моделирование акустического мониторинга объёма замкнутых пространств в среде Matlab с использованием
феноменологического подхода
Бронов
Сергей Александрович,
доктор технических наук,
Малеев Андрей Владимирович,
аспирант,
Михайленко
Ярослав Витальевич,
аспирант,
руководитель группы АСУ Филиал ОАО «ФСК ЕЭС»- МЭС Сибири.
Сибирский Федеральный Университет.
Одной
из важнейших задач во многих областях науки является организация мониторинга
(контроль, обнаружение, классификация, формирование управляющих воздействий). В настоящее время при
решении прикладных задач в области контроля состояния (мониторинга) внешней
среды с высокой степенью достоверности разумно использовать мультисенсорный
подход [2]. Это необходимо в тех случаях, когда парциальные сенсоры (физические
и/или формальные) по отдельности не обеспечивают либо заданной достоверности
решения задачи контроля, либо требуемого качества управляющей информации, используемой,
например, в обратной связи при реализации управляющих воздействий.
Существующие математические модели [1] детально
описывают процессы, происходящие в звукопрозрачных средах. Однако, эти модели
достаточно сложны и громоздки для использования в компьютерном
феноменологическом моделировании мониторинга замкнутых пространств, например, производственных
или бытовых помещений с соответствующим пространственным заполнением. Ситуация
усугубляется при моделировании мультисенсорного мониторинга.
Тем не менее, давно известен так называемый феноменологический подход,
основанный на лучевых представлениях [1]. Последние основаны на том опытно
установленном факте, что при формировании рассеянного поля в месте приема
каждая относительно небольшая часть облученной поверхности, содержащая
совокупность отражающих элементов, вносит свой вклад в общий отраженный
(рассеянный) сигнал. Эти части облученной поверхности наблюдаемых объектов,
отражая падающее на них волновое поле, являются вторичными излучателями, т. е.
дают блики или блестят. Поэтому их часто называют блестящими точками объектов.
Обычно число их велико, а распределение в пространстве и величина вклада в
общий отраженный сигнал являются случайными и во многом зависят от
пространственной структуры объектов и угла их наблюдения.
Происхождение блестящих точек согласуется с понятиями геометрической оптики,
согласно которой падающая на тело волна представляет собой пучок лучей. Каждый
из этих лучей отражается от соответствующего участка площади рассеивающей
поверхности, образуя отраженный луч. Если каждый луч, прежде чем попасть в
область приема, претерпевает более чем одно отражение, имеет место
так называемое многократное рассеяние.
Основываясь
на данном подходе с использованием М-языка MATLAB и персонального компьютера была реализована
феноменологическая модель акустического мониторинга.
Суть этой модели заключается
в том, что в трехмерное виртуальное пространство «излучается» волна, представляющая
собой пучок лучей определенной интенсивности (пространственно ориентированных согласно
диаграмме направленности излучателя). Лучи, переотражаясь
от виртуальных предметов, локализованных в данном пространстве, затухают в
соответствии с поглощающими свойствами среды и попадают в приемник. Попавшие в
приемник (приемники) лучи фиксируются, т.е. записываются временные отрезки
прохождения лучевых трасс излучатель-приёмник и соответствующие этим трассам амплитуды
или мощности (интенсивность) многократно переотражённых
лучей. В результате в приемном устройстве, на основе суперпозиции множества
попавших лучей, формируется последовательность временных сигналов, характеризующая
(неоднозначно – в отсутствие пространственной селекции при приёме) пространственное
содержание исследуемого объёма пространства. Иллюстративно это можно изобразить
на рис. 1.
Необходимость применения MATLAB в
данной модели продиктована относительной простотой визуализации получаемых
результатов, что позволило сосредоточиться на программировании физики процесса.
Графическое представление контролируемого пространства средствами трехмерной
графики MATLAB представлено на рис. 2.
Каждый предмет контролируемого
пространства характеризуется своим коэффициентом поглощения и выводится на
экран определенным цветом (цветовая гамма не различима на черно-белом изображении
рис. 2). Излучатель и приемники (на рисунке показано два приемника) расположены
в крайнем правом положении.
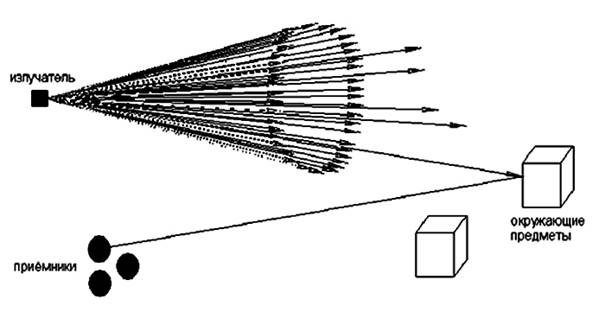
Рис. 1. Иллюстрация феноменологического
подхода.
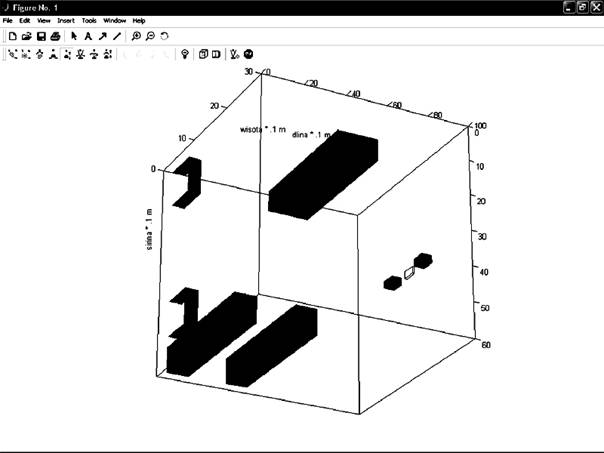
Рис.2. Графическое представление
контролируемого пространства.
Временной сигнал, полученный
суперпозицией всех лучей, попавших в один из приемников, изображен на рис.3. На
этом рисунке по оси абсцисс отложено время (мс), а по оси ординат мощность
звуковой волны (Вт), попавшей в приемник. Следует отметить, что наряду с
излучателем приемники имеют свою диаграмму направленности. Число приемников, а
также их пространственное положение и положение излучателя может быть любым.
Также произвольными являются размеры контролируемого пространства, количество и
пространственное положение окружающих предметов.
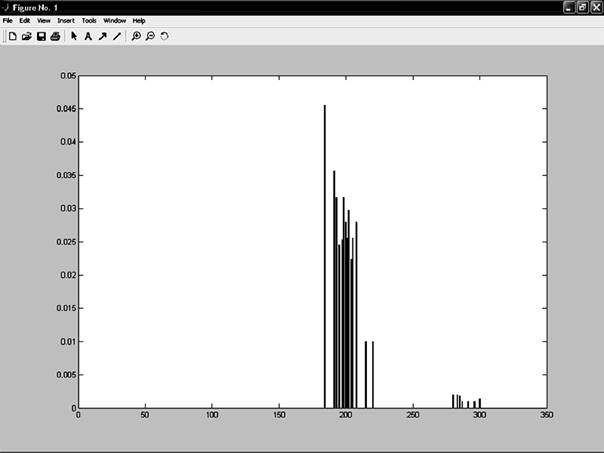
Рис. 3. Временной сигнал, как
суперпозиция всех перотражённых лучей данного объёма пространства.
Посторонние предметы,
выявление и классификация которых является задачей мониторинга (на данном
рисунке не показаны), представляют тела различного объема. Поглощающая
способность данных тел различна, например человек или животное являются, по сути,
черным телом (энергия, попадающая на тело, поглощается полностью), различные
механизмы и твердые предметы, перемещающиеся в контролируемом пространстве, напротив, имеют множество блестящих
точек. Черные тела, перекрывая акустические лучи, будут уменьшать количество
полезных эхо-сигналов, попавших в приемник. Движущиеся предметы,
характеризующиеся множеством блестящих точек, будут вызывать появление дополнительных
эхо-сигналов. Относительное изменение положения и количества эхо-сигналов позволяет
определить наличие постороннего предмета и произвести сравнительную классификацию
последнего.
В реальном помещении всегда
существуют конвекционные потоки и флуктуации воздуха, поэтому при последующем
излучении принципиально невозможно получить акустический портрет помещения,
аналогичный предыдущему. В связи с этим данная модель дополнена возможностью
моделирования зон аэроакустической нестабильности, в
которых скорость звука, давление и затухание сигнала изменяются случайным
образом. Появляется множество «дышащих» целей, амплитуда которых сопоставима с
порогом обнаружения. Поэтому все, что было сказано выше, правомочно только для
опорного информационного массива сигналов, полученного путем отсечения
нестабильных элементов. На практике опорный массив получается путем «обучения»,
посредством анализа множества факторов [2].
На рис. 4 показано моделирование
зон акустической нестабильности. На данном рисунке можно увидеть нестабильные элементы,
обусловленные вероятностными характеристиками процесса, а также стабильные
эхо-сигналы. Следует отметить, что для простоты анализа все сигналы,
превышающие определенный порог, обозначены одинаковым уровнем.
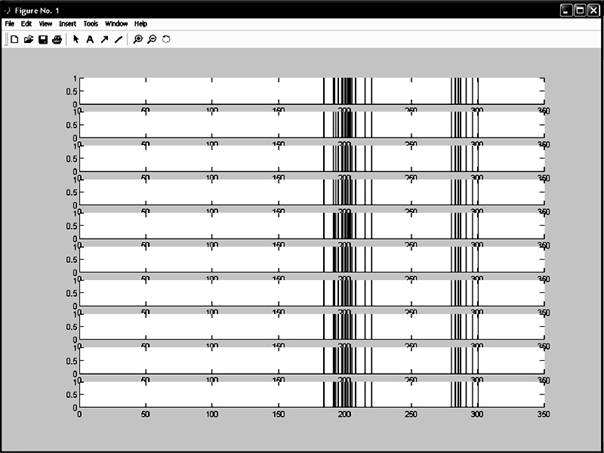
Рис. 4. Моделирование зон акустической
нестабильности.
С помощью данной
математической модели проведен сравнительный анализ возможностей акустического
мониторинга. Проверена возможность обнаружения малого подвижного предмета и проанализирована
возможность классификации объектов на основании объемных соотношений. Для этого
произведен анализ состава отраженных эхо-сигналов (парциальных перотраженных
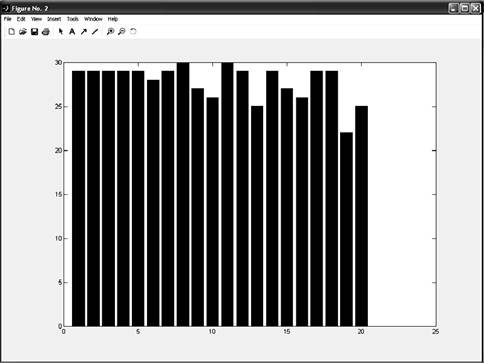
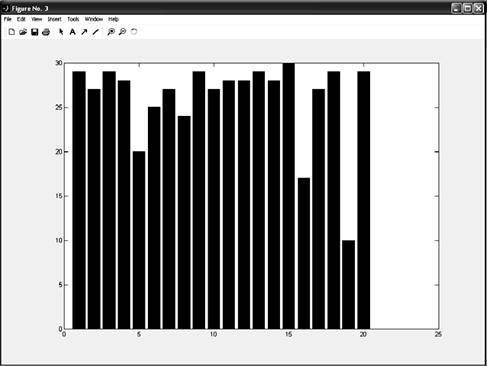
акустических лучей) в зависимости от размеров подвижных предметов. На рисунках
5а, 5б и 5в показаны относительные степени отличия между опорным массивом,
полученным при обучении (в отсутствии посторонних предметов) системы мониторинга
и текущим массивом при наличии подвижного предмета. Подвижный предмет «черное
тело» с линейными размерами 10×10×10 см, 30×30×30 см,
50×50×50 см., появлялся равновероятно в любом месте контролируемого
объёма помещения. Было произведено двадцать независимых замеров, результаты
которых и показаны на рисунках.
Из данных рисунков видно,
что изменение числа отраженных эхо-сигналов до 20 процентов от опорного массива
характерно для малого предмета (птица, мелкое животное, например мышь), от 20
до 50 процентов – средний предмет (собака, кошка) и свыше 50 процентов
характерно для человека.
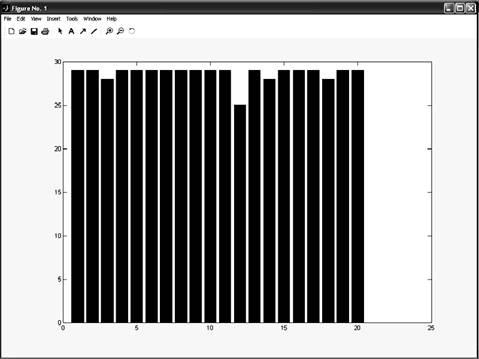
а)
б)
в)
Рис. 5а, 5б, 5в. Примеры результатов
замеров (отличий между опорным и текущим массивами)
Разработанная модель
выявляет достаточно высокую избирательную способность системы акустического
мониторинга. Это подтверждает возможность классификации объектов даже при простой
пространственной организации приемных сенсоров, не требующей построения решёток
сенсоров.
Литература.
1. Качанов Е.И., Пигулевский Е.Д., Яричин Е.М. Методы и средства гидроакустической
голографии. - Л.: Судостроение,
2. Малеев А.В., Михайленко
Я.В. Трехмерный акустический мультисенсорный
мониторинг в задаче обнаружения и классификации подвижных объектов. – М.: РТСофт, «Мир компьютерной автоматизации» №2-2006.
Поступила в
редакцию 27.07.2008 г.