Математическое моделирование
гидропривода динамического стенда авиационного тренажёра
Прошин
Иван Александрович,
доктор технических наук, профессор,
Прошкин
Виктор Николаевич,
кандидат технических наук, доцент,
Тимаков
Владимир Михайлович,
соискатель.
Пензенская государственная технологическая академия.
Создание авиационных тренажёров
обуславливается настоятельной необходимостью повышения качества подготовки
лётного состава, обеспечения безопасности и надёжности полётов при сокращении затрат
на подготовку, обучение и тренировку лётных экипажей транспортных средств и является
одним из приоритетных направлений развития науки и техники.
Комплексный авиационный тренажёр представляет
собой совокупность взаимосвязанных элементов:
· кабины самолёта со всем штатным оборудованием, установленной
на динамическом стенде;
· вычислительного устройства;
· навигационных приборов;
· задатчиков условий полета и устройства ввода
отказов имитируемых приборов и систем;
· агрегатов системы имитации визуальной
обстановки;
· динамического стенда (ДС),
обеспечивающих систематическую тренировку
лётного состава независимо от метеорологических условий, наличия и состояния
самолетов данного типа, а также вне связи с воздушной обстановкой и ограничениями
воздушного движения.
Динамический стенд (рис.1) является основным
элементом тренажёра, формирующим акселерационные воздействия, подобные тем,
которые человек испытывает в реальных условиях, находясь на движущемся объекте
(самолете, танке и т.д.), и одновременно сам представляет собой систему взаимосвязанных
элементов, объединяющих:
· подвижную платформу с удерживающими кинематическими
звеньями;
· кабину тренажера;
· проекционный экран;
· проектор телевизионной аппаратуры;
· имитатор визуальной обстановки;
· исполнительный электрогидравлический привод.
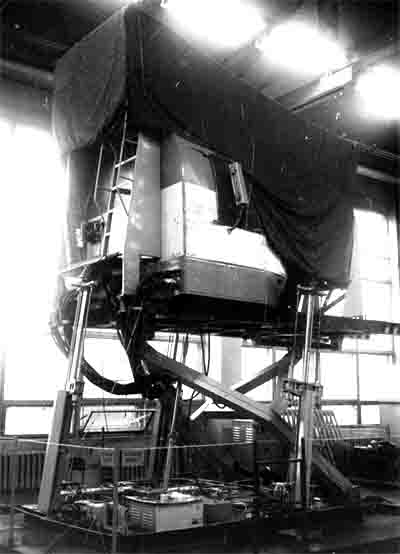
Рис. 1. Динамический стенд тренажёра.
В данной работе основное внимание уделено исследованию
и созданию гидропривода динамического стенда с компенсацией веса нагрузки.
Существенным недостатком
известных динамических стендов является
влияние веса подвижной платформы и установленного на ней оборудования на работу
следящего привода.
В связи с тем, что при движении
вниз сила веса подвижных частей складывается с формируемой гидроприводом силой,
а при движении вверх противодействует
ей, создается асимметрия механической характеристики привода, приводящая, в
конечном счете, к искажению процесса отслеживания входных электрических
сигналов. Особенно этот недостаток проявляется при отработке высокочастотного
входного сигнала.
Для устранения этого недостатка в следящий
гидропривод трёхстепенного динамического
стенда с вертикальным расположением гидроцилиндров введен гидродинамический
компенсатор статической нагрузки (ГДКСН) [1]. Принцип действия гидропривода и
системы компенсации поясняется структурной схемой изображенной на рис. 2. Здесь
обозначено ГА – гидроаккумулятор; ГКСН – гидрокомпенсатор статической
нагрузки; ГЦ – гидроцилиндр; Др.1, Др.2,
Др.5, Др.6 – сопловые дроссели; Др.3, Др.4, Др.7, Др.8 – калиброванные гидравлические
дроссели; ДД – датчик давления; ДП – датчик перемещений; ДПД – датчик перепада
давления; ДС – датчик скорости; ДТ – датчик тока; ЗКВ – задатчик
компенсационных воздействий; ИГП – исполнительный гидравлический привод; ИИС –
информационно-измерительная система; ПК – предохранительный клапан; ПОС –
позиционная (пружинная) обратная связь; РЗ 1, РЗ 2 – распределительный
золотник; СА 1, СА 2 – сопловой аппарат; УУ 1, УУ 2 – управляющее устройство;
ФУВ – формирователь управляющего воздействия; ЭГУ – электрогидравлический усилитель;
ЭПМ – электромеханический преобразователь.
Исполнительным звеном следящего привода
является трехполостной гидроцилиндр ГЦ,
две полости которого рабочие и одна компенсационная. В
компенсационной полости ГЦ
поддерживается постоянное давление, уравновешивающее статический вес груза,
воздействующий на продольную ось штока ГЦ. Такая конструкция гидроцилиндра
обеспечивает расширение функциональных возможностей и симметрию характеристик
гидропривода. Гидроцилиндр управляется через распределительный золотник РЗ и
электрогидравлический усилитель ЭГУ от управляющего устройства УУ. Исполнительный
гидропривод ИГП включает в себя также
датчик перепада давлений ДПД.
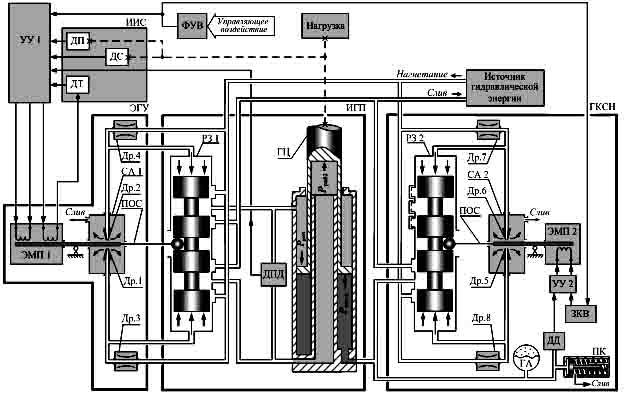
Рис. 2. Структурно-функциональная схема
следящего гидропривода с компенсаций статической нагрузки.
Движение штока гидроцилиндра создается за
счет разности давления в рабочих полостях Рраб1 и Рраб.2,
получаемого за счет управления потоком рабочей жидкости с помощью ЭГУ на вход
которого, через регулятор давления управляющего устройства УУ1, подается
сигнал, пропорциональный разности задающего сигнала формирователя управляющих
воздействий ФУВ и сигнала с датчика положения ДП отрицательной обратной связи.
Как видно из рис. 2 датчик положения ДП, регулятор давления,
электрогидравлический усилитель и гидроцилиндр ГЦ образуют следящую систему с
отрицательной обратной связью по положению, которая позволяет воспроизводить
градиенты ускорений методом задающих воздействий.
Гидропривод с позиций
системного подхода – это система взаимосвязанных элементов, обладающая свойствами,
не сводящимися к сумме свойств отдельных частей и включающая в себя целый ряд
функциональных компонент (рис. 2). Поэтому математическая модель всей
гидросистемы может быть представлена как взаимосвязанная совокупность звеньев –
математических моделей отдельных элементов
и, прежде всего, моделей исполнительного гидропривода и гидроусилителя,
составляющих неизменяемую часть системы и объединяющих следующие
линеаризованные уравнения:
· движения массы нагрузки ![]() , приведённой к оси гидроцилиндра
, приведённой к оси гидроцилиндра
 (1)
(1)
· движения поршня гидроцилиндра с массой ![]()
 (2)
(2)
· расхода жидкости в гидроприводе
![]() ; (3)
; (3)
· скорости перемещения золотника
 ; (4)
; (4)
· движения якоря электрогидравлического
усилителя
 (5)
(5)
· обмотки управления электромеханического
преобразователя гидроусилителя
![]() . (6)
. (6)
Здесь ![]() – координата
перемещения платформы,
– координата
перемещения платформы, ![]() ;
; ![]() – координата перемещения
поршня гидроцилиндра,
– координата перемещения
поршня гидроцилиндра, ![]() ;
; ![]() – коэффициент
позиционной (шарнирной) нагрузки,
– коэффициент
позиционной (шарнирной) нагрузки, ![]() ;
; ![]() – рабочая площадь
поршня,
– рабочая площадь
поршня, ![]() ;
; ![]() – перепад давлений в гидроцилиндре,
– перепад давлений в гидроцилиндре, ![]() ;
; ![]() – сила
тяжести подвижной части динамического стенда,
– сила
тяжести подвижной части динамического стенда, ![]() ;
; ![]() – координата перемещения золотника,
– координата перемещения золотника, ![]() ;
; ![]() – коэффициент
передачи золотника по расходу,
– коэффициент
передачи золотника по расходу, ![]() ;
; ![]() – коэффициент скольжения по расходу,
– коэффициент скольжения по расходу, ![]() ;
; ![]() – коэффициент, учитывающий сжимаемость жидкости
с приведенным значением модуля объемной упругости
– коэффициент, учитывающий сжимаемость жидкости
с приведенным значением модуля объемной упругости ![]() ,
, ![]() ;
; ![]() – объем рабочей камеры
гидроцилиндра;
– объем рабочей камеры
гидроцилиндра; ![]() –
коэффициент передачи электромеханического
преобразователя по току,
–
коэффициент передачи электромеханического
преобразователя по току, ![]() ;
;  – коэффициент передачи
гидравлического мостика сопло – заслонка по расходу,
– коэффициент передачи
гидравлического мостика сопло – заслонка по расходу, ![]() ;
; ![]() – расход в гидроцилиндре,
– расход в гидроцилиндре, ![]() ;
; ![]() – коэффициент передачи
электромеханического преобразователя по перемещению заслонки в рабочей точке,
– коэффициент передачи
электромеханического преобразователя по перемещению заслонки в рабочей точке, ![]() ;
; ![]() – коэффициент, учитывающий гидродинамическое воздействие струй жидкости
на заслонку,
– коэффициент, учитывающий гидродинамическое воздействие струй жидкости
на заслонку, ![]() ;
; ![]() – коэффициент противо-ЭДС,
– коэффициент противо-ЭДС, ![]() ;
; ![]() – эквивалентное активное
сопротивление обмоток управления ЭМП,
– эквивалентное активное
сопротивление обмоток управления ЭМП, ![]() ;
;![]() – индуктивность обмоток управления ЭМП,
– индуктивность обмоток управления ЭМП, ![]() ;
; ![]() – коэффициент жёсткости силовой проводки,
– коэффициент жёсткости силовой проводки, ![]() ;
; ![]() – коэффициент вязкого
трения,
– коэффициент вязкого
трения, ![]() – коэффициент
жёсткости пружины обратной связи гидроусилителя,
– коэффициент
жёсткости пружины обратной связи гидроусилителя, ![]() ;
; ![]() – коэффициент вязкого
трения,
– коэффициент вязкого
трения, ![]() ;
; ![]() – коэффициент вязкого
демпфирования якоря ЭМП,
– коэффициент вязкого
демпфирования якоря ЭМП, ![]() ;
; ![]() –
приведенное к оси сопла значение
массы якоря электромеханического преобразователя и заслонки,
–
приведенное к оси сопла значение
массы якоря электромеханического преобразователя и заслонки, ![]() ;
; ![]() –
площадь поперечного сечения золотника,
–
площадь поперечного сечения золотника,
![]() ;
; ![]() – координата перемещения заслонки,
– координата перемещения заслонки, ![]() ;
; ![]() –
напряжение на обмотке преобразователя,
–
напряжение на обмотке преобразователя, ![]() ;
; ![]() – ток
управления ЭМП,
– ток
управления ЭМП, ![]() .
.
Полная
математическая модель гидропривода с учётом нелинейности отдельных элементов
кроме (1) – (6) включает в себя ряд функциональных
зависимостей, учитывающих взаимосвязь между отдельными переменными, насыщение
по расходу и давлению, трение, запаздывание.
С учётом того,
что в следящем гидроприводе с компенсацией статической нагрузки диапазон изменения
управляющих воздействий значительно снижается, при исследовании законов
управления гидроприводом с достаточной для практики точностью может быть принята
линеаризованная математическая модель.
Как объект
управления гидропривод представим преобразователем, за выходную (управляемую) координату
которого примем перемещение массы нагрузки ![]() . Управляющее воздействие
. Управляющее воздействие ![]() – напряжение на обмотке преобразователя
– напряжение на обмотке преобразователя ![]() , основные возмущающие воздействия
, основные возмущающие воздействия ![]() – сила тяжести подвижной части динамического
стенда
– сила тяжести подвижной части динамического
стенда ![]() и силы, обусловленные движением и изменениями нагрузки.
и силы, обусловленные движением и изменениями нагрузки.
Модель (1) – (6) с
учётом предлагаемой структуры гидропривода представим в пространстве состояний.
За переменные состояния примем: ![]() –
токи управления ЭМП гидроусилителей;
–
токи управления ЭМП гидроусилителей;
![]() – скорости перемещения заслонок
– скорости перемещения заслонок ![]() гидроусилителей;
гидроусилителей; ![]() – координаты перемещения заслонок
– координаты перемещения заслонок ![]() ;
; ![]() – координаты
перемещения золотников
– координаты
перемещения золотников ![]() ;
; ![]() – перепад давлений
– перепад давлений ![]() , и компенсирующее
давление в компенсационной полости трёхполостного гидроцилиндра;
, и компенсирующее
давление в компенсационной полости трёхполостного гидроцилиндра; ![]() – скорость перемещения
массы нагрузки
– скорость перемещения
массы нагрузки ![]() ;
; ![]() – координата
перемещения массы нагрузки
– координата
перемещения массы нагрузки ![]() .
.
При ![]() координаты перемещений
массы нагрузки х и поршня
координаты перемещений
массы нагрузки х и поршня ![]() гидроцилиндра
совпадают
гидроцилиндра
совпадают ![]() , а динамическое
состояние гидропривода с компенсацией статической нагрузки может быт задано в пространстве
состояний вектора
, а динамическое
состояние гидропривода с компенсацией статической нагрузки может быт задано в пространстве
состояний вектора ![]() моделью
блочно-матричной формы
моделью
блочно-матричной формы
 (7)
(7)
Матрицы ![]() и
и ![]() представляют собой
модели электрогидравлических усилителей и расходов жидкостей исполнительного
гидропривода и гидродинамического компенсатора статической нагрузки, имеют
одинаковую структуру и размерность
представляют собой
модели электрогидравлических усилителей и расходов жидкостей исполнительного
гидропривода и гидродинамического компенсатора статической нагрузки, имеют
одинаковую структуру и размерность ![]() :
:
 .
.
На основе разработанной
математической модели (7) в программной среде Mathcad проведены исследования отработки
гидроприводом управляющих воздействий по перемещению, задаваемому выражением
![]() (8)
(8)
при равноускоренном
движении с различными ускорениями и, задаваемому выражением
 (9)
(9)
при постоянной
перегрузке в соответствии с предлагаемым способом [2].
На рис. 3 приведены
временные характеристики перемещений, скоростей и ускорений при отработке
постоянных ускорений ![]() по закону (8)
гидроприводом без компенсации и с компенсацией веса платформы. Рис. 4 отражает
те же характеристики при движении
платформы с постоянной скоростью изменения ускорения, численно равной
по закону (8)
гидроприводом без компенсации и с компенсацией веса платформы. Рис. 4 отражает
те же характеристики при движении
платформы с постоянной скоростью изменения ускорения, численно равной ![]() по закону (9).
по закону (9).
Здесь обозначено ![]() – ускорение свободного
падения
– ускорение свободного
падения ![]() ; ускорение
; ускорение ![]() скорость
скорость ![]() и перемещение
и перемещение ![]() , соответственно. Цифрой 0 помечены переменные системы с
компенсацией веса платформы.
, соответственно. Цифрой 0 помечены переменные системы с
компенсацией веса платформы.
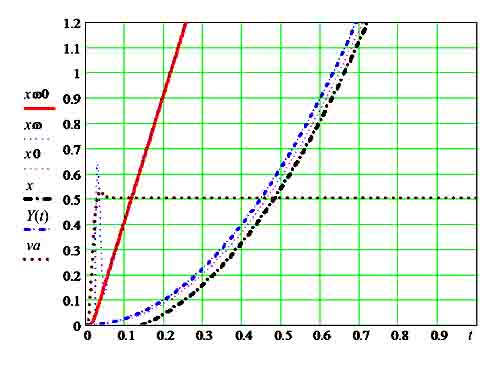
Рис. 3. Временные характеристики параметров движения
платформы динамического стенда при отработке перемещений по закону (8).
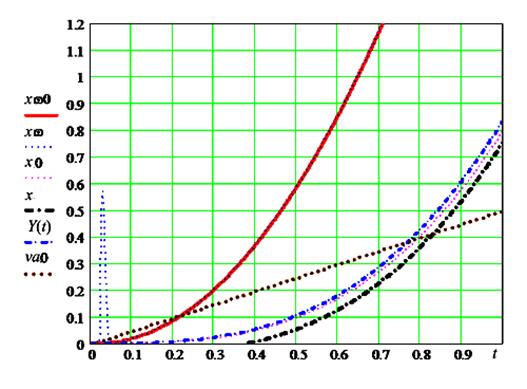
Рис. 4.
Временные характеристики параметров движения платформы динамического стенда при
отработке перемещений по закону (9).
Сравнительный анализ
приведенных характеристик показывает, что при отработке законов управления (8)
и (9) в системах гидропривода автоматически задаются законы управления
скоростями и ускорениями платформы.
В системах без
компенсации веса платформы на начальных участках переходных характеристик наблюдаются
большие переходные процессы и задержки в отработке управляющих воздействий.
Точность отработки управляющих воздействий
в системах гидропривода с компенсацией веса платформы выше. Об этом же
свидетельствует экспериментальная частотная характеристика, показанная на рис. 5.
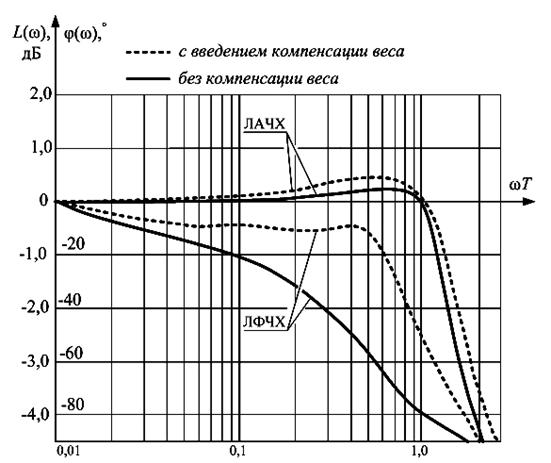
Рис. 5.
Экспериментальные логарифмические частотные характеристики гидропривода с компенсацией
и без компенсации веса платформы динамического стенда.
Практическое использование разработанных
способов, систем и моделей при создании динамических стендов авиационных
тренажёров для подготовки лётного состава самолётов Ил – 76, Ту – 144, Ту –
154, Ту – 160, Су – 25, Як – 18, Миг – 25, Ми – 24, Ми – 8, противолодочного
вертолёта В – 14 показало их высокую эффективность, выразившуюся в более точном
воспроизведении акселерационных воздействий, повышении управляемости и надёжности
тренажёров.
Литература.
1.
А.с. №
77429 / Мануйлович В.П., Тимаков В.М., Швецов П.Е.
2.
А.с. №
233272 / Мануйлович В.П., Клюев Б.В., Тимаков В.М., Швецов П.Е.
Поступила в редакцию 20.10.2008 г.