Замкнутая многоконтурная система управления выбросами загрязняющих
веществ промышленных предприятий.
Шабалов Александр Александрович,
аспирант Санкт-Петербургского
Государственного Университета Аэрокосмического Приборостроения.
Деятельность
промышленных предприятий оказывает негативное влияние на экологию, вследствие
загрязнения атмосферы промышленными выбросами, ухудшающих ее состояние,
отрицательно влияющей на здоровье и продолжительность жизни людей, проживающих
в непосредственной близости с данными предприятиями. Поэтому проблема защиты
окружающей среды и управления концентрацией загрязняющих веществ, выбрасываемых
промышленными предприятиями в атмосферу,
является актуальной и требует решения.
Предложенная
в настоящей статье замкнутая многоконтурная система управления выбросами промышленных
предприятий (ЗМСУВПП), построена на основе концепции «Природа-техногеника», предложенной и развитой в [1…6],
позволяет обеспечить эффективное управление очистными агрегатами и, если
потребуется, самим предприятием, не допуская превышения установленных норм
выброса загрязняющих веществ.
Структурная
схема ЗМСУВПП представлена на рис 1, алгоритм ее работы состоит из 6 этапов.
На
первом этапе производится измерение концентрации загрязняющего вещества,
температуры факела и скорость его движения при помощи стационарной измерительной
системы расположенной у устья трубы. Полученные данные необходимы для расчета
массы загрязняющего вещества, выбрасываемого в атмосферу, а также выработки системой
управления необходимого управляющего воздействия.
На
втором этапе, системой управления производится расчет пространственных координат
точки максимума концентрации загрязняющего
вещества, на основе данных, полученных от стационарной измерительной системы,
расположенной у устья трубы, а также погодной станции, измеряющей температуру
окружающей среды, скорость и направление ветра.
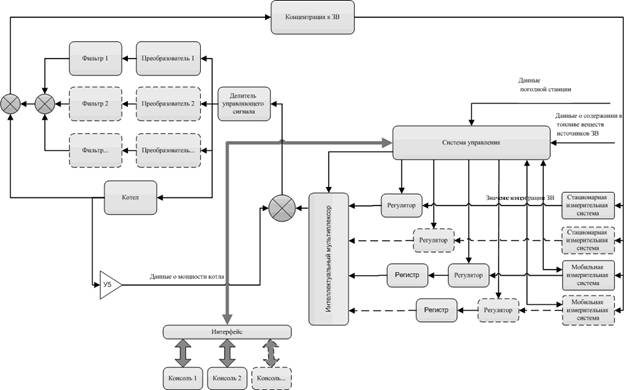
Рис.1.
Структура ЗМСУВПП.
На
третьем этапе, в точку пространства максимума концентрации загрязняющего
вещества, высылается зонд с мобильной измерительной системой. Мобильная измерительная
система производит измерение концентрации загрязняющего вещества в заданной
системой управления точке пространства. Полученные данные передаются в центр
управления. Поскольку зонд с мобильной измерительной системой не может
непрерывно находится в точке измерения, то данные о концентрации загрязняющего
вещества затруднительно получать непрерывно, поэтому они могут использоваться
только для выработки корректирующего управляющего воздействия. Чтобы эмитировать
непрерывность подачи данных от мобильной измерительной системы, последнее
переданное значение фиксируется в регистре-защелке, на время, в которое измеренное
значение может считаться достоверными.
На
четвертом этапе системой управления производится вычисление величины корректирующих
весов и коэффициентов для регуляторов
(рис. 2), таких как максимально допустимое значение концентрации загрязняющего
вещества для данной точки пространства, коэффициент
усиления управляющего сигнала, а также значение временной задержки, с которой
он должен подаваться. Вычисленные, при помощи системы управления, значения
весов и коэффициентов подаются вместе с измеренными значениями концентрации
загрязняющего вещества на регуляторы, вырабатывающие управляющие воздействия.
Регулятор представляет собой классический ПИД регулятор, состоящий из позиционирующего, интегрального
и дифференцирующего звена. Также в регулятор входят вспомогательные звенья,
необходимые для улучшения качества регулирования, а именно: управляемый
усилитель сигнала, компаратор, производящий сравнение измеренной величины и
эталонной, а также ограничитель слабого сигнала, обеспечивающий нечувствительность
регулятора к незначительным колебаниям сигнала.
Работа регулятора
выражается следующей формулой:
|
|
(1) |
|
(2) |
|
|
(3) |
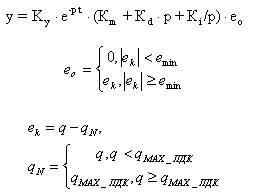
где, у – величина управляющего воздействия, Kу - коэффициент усиления, е-p×t – величина абсолютной временной задержки подачи
управляющего сигнала, выраженной в виде функции запаздывания, t – время задержки, Кm – коэффициент усиления позиционирующего звена, Кd - коэффициент усиления
дифференцирующего звена, Кi
- коэффициент усиления интегрирующего звена, eo – величина
ошибки рассогласования на выходе блока «ограничитель слабого сигнала», еk – величина ошибки рассогласования, emin – минимально-допустимое значение ошибки
рассогласования, qMAX_ПДК – предельно допустимая концентрация данного
загрязняющего вещества, q – измеренное значение концентрации данного загрязняющего
вещества, qN – эталонное значение максимума концентрации, уr – величина скорректированного
значения управляющего сигнала.
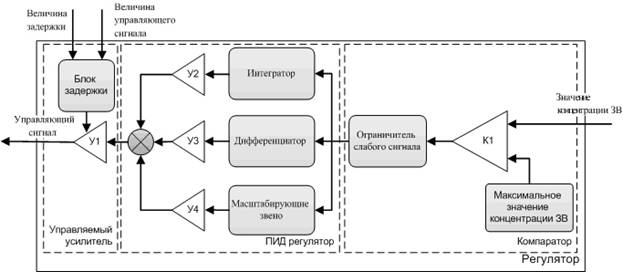
Рис. 2.
Структура регулятора.
На
пятом этапе производится выбор посредством
интеллектуального мультиплексора выхода регулятора, управляющий сигнал которого
будет осуществлять управление работой
ЗМСУВПП. Выбор регулятора, осуществляется посредством сопоставления нормированной
величины управляющего сигнала и степени достоверности измеренного значения
концентрации, определяемой системой управления для каждой измерительной системы.
Выбранный управляющий сигнал подается на сумматор вместе с сигналом пропорциональным
мощности котла.
На
шестом этапе производится усиление обобщенного управляющего сигнала до уровня,
необходимого для управления очистными агрегатами, а затем разделение его между
ними в соответствии со следующим уравнением:
|
|
(4) |
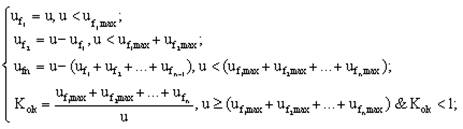
где
u – величина суммарного управляющего сигнала uf1, uf2, uf3 – величина управляющего сигнала,
подаваемая на очистной агрегат номер 1, 2, n, uf1max,
uf2max, uf3max – максимальное значение управляющего сигнала
для очистного агрегата номер 1, 2, n, Kok
– величина ослабляющего коэффициента, управляющего мощностью котла.
Очистные
агрегаты производят очистку газовоздушной смеси внутри трубы промышленного предприятия
в соответствии с управляющим сигналом,
пропорциональном повышению концентрации загрязняющего вещества относительно
установленной нормы
Рассмотренная в
настоящей статье ЗМСУВПП позволяет осуществлять непрерывный мониторинг выбросов
загрязняющих веществ в атмосферу, а также осуществлять эффективное управление
очистными агрегатами, не допуская выброс в атмосферу загрязняющих веществ выше
установленных норм, а также чрезмерное загрязнение определенных областей. Стационарные
измерительные системы могут быть установлены непосредственно рядом с объектами
первой важности, объектами, в которых не допустимо превышение концентрации
загрязняющего вещества, а именно: населенными пунктами, сельскохозяйственными
угодьями, фермами, заповедниками.
Мобильные измерительные
системы, реализованные в виде летательных
аппаратов, обеспечивают максимальную гибкость измерений, дают возможность производить измерение в
необходимой точке пространства, в том числе и в факеле. Задействованные в
процессе измерения 5 -7 мобильных
измерительных систем образуют мобильную измерительную группу, которая может
выполнять такие задачи как: определение максимума концентрации в трудно
доступной точке пространства, построение и уточнение функции плотности
распределения концентрации загрязняющего вещества в пространстве, измерение и
уточнение коэффициентов вертикальной и горизонтальных диффузий.
Увеличивая количество
измерительных систем, а соответственно и количества управляющих контуров
системы управления, производится повышение точности измерительной системы и
скорости ее реагирования.
Литература.
1.
2.
3.
Solnitsev R.I. Creation
of “Nature-technogenic” control systems on the base of information technologies,
proceedings IEHS’02/SPb.: SUAI, 2002,p.12-17.
4.
Solnitsev R.I. Human factor minimization in
the “Nature-technogenic” system, proceedings IEHS’04/SPb.: SUAI, 2004,p.15-17.
5.
Сольницев
Р.И. Построение замкнутых систем «Природа-техногеника». Журнал «Открытое
образование», труды ХХХШ МНТК IT+S&E’06,
Украина, Крым, Ялта-Гурзуф, 20-30 мая
6.
Поступила в редакцию 21
января