Испытательная техника спирально-анизотропных
тел.
Резников
Станислав Сергеевич,
аспирант
Санкт-Петербургского Государственного Университета Информационных Технологий, Механики и Оптики.
Модель спирально-анизотропного тела хорошо
представляет канат и кабель. Механические испытания входят в основную группу
испытаний кабелей. Методы определения механических свойств обусловлены
характером механических воздействий на кабель в процессе его эксплуатации. Парк
испытательных средств для испытания таких конструкций,
с одной стороны, достаточно развит: разрывные машины, динамические и статические
машины. Но, с другой стороны, в связи с тем, что всегда требуется определять физико-механические
характеристики винтовых элементов, таких устройств существуют единицы.
В данной работе рассматриваются несколько вариантов
устройств, позволяющих определить упругие модули.
Приведенные здесь методы применимы для
определения свойств таких конструкций, как кабели и канаты. Нам, однако,
предпочтительнее использовать метод, где было бы реализовано не только
стесненное растяжение, но и свободное. Это связано с тем, что для задачи
растяжения при тех условиях, которые были сформулированы в монографии [1], в
качестве упругих характеристик были использованы Е1
v1, G, полностью определяющие свойства условного спирального
элемента кабелей. Для их определения необходимо три неодинаковых опыта – на
стесненное растяжение, стесненное кручение, свободное растяжение или на
свободное кручение с реализацией моторного эффекта. Принципиальная основа экспериментов
такова: для выбранной расчетной схемы установить коэффициент пропорциональности
между внешним силовым воздействием и деформацией образца. Любой из приборов для
определения механических характеристик имеет дело с образцами определенной
длины, размеров и формы поперечного сечения, соотношение между которыми
предварительно обосновывается.
Первая
схема
(рис.1).
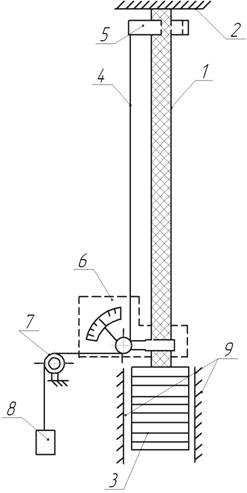
Рис. 1.
Образец кабеля 1 в подвешенном состоянии
закреплялся в неподвижном зажиме 2. К другому концу прикреплялась грузовая платформа
3, на которой размещались калиброванные грузы. Тросик
4, связанный одним концом с подшипниковым узлом 5, проходит через блоки прибора
6 и блок 7. Груз 8 обеспечивал необходимое натяжение.
Образец кабеля при продольном
нагружении раскручивался и удлинялся, перемещая блок
приборов, связанный с регистрирующим устройством. Для случая без вращения
кабеля грузовая платформа стопорилась в опорах 9 со свободным перемещением
вниз.
Для измерения угла раскручивания тросик закреплялся на кабеле так, чтобы наматываться на
него или калиброванную втулку, а сам прибор закрепляли вне кабеля. Измерялся
угол раскручивания и регистрировалась зависимость
нагрузка-угол поворота. Снятие показаний прибора производилось при циклах нагрузка-разгрузка
в случаях свободного вращения кабеля и без раскручивания.
Описание
второго прибора.
Ниже приведена деталировка макета с
функциональными характеристиками деталей эскизного чертежа устройства (рис 2).
Опорной поверхностью
устройства является плита из текстолита класса А. Направляющая
3 имеет пазы для передвижения по ним детали 4, которая препятствует
вращению плиты при скручивании тросика. К плите крепится
зажимная цанга 5, в которую зажимается тросик. Для
обеспечения плавного перемещения плиты нижней в вертикальном направлении, при
скручивании испытуемого тросика применяются четыре
пружины. Плита верхняя – сталь 0,8 листовая, крепится уголками 8 к направляющим
2. На верхней плите установлен корпус 10 и транспортир 11. Транспортир с
градуировкой на 360°– фиксирует скручивание тросика и
обеспечивает плавное движения втулки 13. Втулка запрессована по внутреннему
диаметру, во втулке пропущен тросик
9. Винт стопорный 14 фиксирует положение
втулки в процессе эксперимента для удобства регистрации результатов.
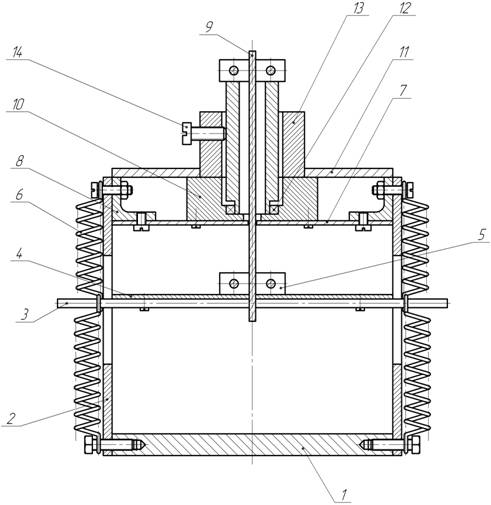
Рис. 2.
Третий
вариант устройства [2]. Отличительной особенностью является
введение в структуру программного модуля.
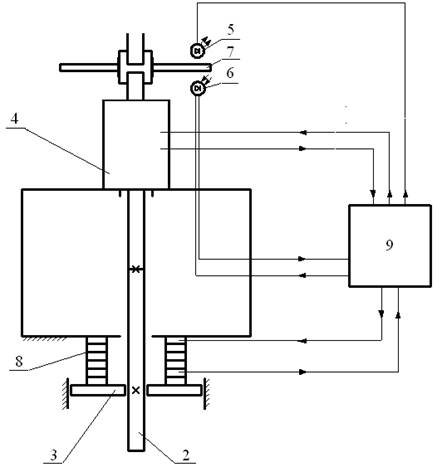
Рис. 3.
Измерительный модуль для испытания
анизотропных стержней содержит основание 1 (рис. 3), в котором подвешен верхним
концом стержень 2, нижний конец которого жестко закреплен в мембране 3, имеющей
возможность поступательного перемещения, верхний конец стержня 2 жестко
соединен с валом электродвигателя 4. Датчик угловых перемещений выполнен
оптико-механическим и оптическим сопряжением источника светового излучения 5 и
приемника светового излучения 6, между которыми на вале электродвигателя 4
установлен кодовый диск 7. Датчик линейных перемещений выполнен в виде пакета пьезошайб 8, механически соединенного с мембраной 3. Информационный выход датчика угловых перемещений, информационный
выход датчика линейных перемещений и информационный выход электродвигателя
соединены с входами вычислительной машины 9. Выходы вычислительной
машины 9 соединены с входами источника светового излучения 5, приемника светового
излучения 6, входом электродвигателя 4, входом датчика линейных перемещений.
Программой на компьютере формируется
управляющий сигнал на контроллер, поворачивающий вал двигателя на определенный
угол. Датчик точно фиксирует угловое смещение верхнего конца стержня. Мембрана
не позволяет нижнему концу стержня вращаться, при этом возможны осевые
перемещения. Эти перемещения фиксируются пьезошайбами,
сигнал с которых через АЦП подается в компьютер, что позволяет осуществлять
наблюдение зависимости перемещения от угла поворота стержня.
Литература.
1.
Мусалимов В. М.
Элементы механики кабельных конструкций / В.М. Мусалимов,
Б.В. Соханев, С.Я. Мокряк.
- Томск: Изд-во Том. ун-та, 1981. - 119 с.:ил.
2.
Мусалимов В. М.
Механические испытания гибких кабелей. - Томск: Изд-во Том. ун-та, Б. г. - 63 с.:ил.
3.
Пат.
2317535 Российская Федерация, МПК7 G01N3/08.
Устройство для испытания анизотропных стержней / Мусалимов
В.М., Ноздрин М.А., Петрищев М.С., Резников С.С., Бондарец А.В. (Россия), Цейтнер
Й. (Германия); заявитель и патентообладатель Государственное
образовательное учреждение высшего профессионального образования
"Санкт-Петербургский государственный университет информационных
технологий, механики и оптики". – № 2006128830/28; заявл.
08.08.06; опубл. 20.02.08, Бюл.
№ 5. – 7 с.:ил.
Поступила в редакцию 20.05.2008 г.