Моделирование и анализ качества
переходных процессов в нечетких системах управления электроприводом
Кабылбекова
Виктория Васильевна,
старший преподаватель кафедры
«Транспорта и организации перевозок»,
Кулахметов
Рустам Фаридович,
аспирант кафедры «Электрооборудование и
автоматика судов».
Астраханский государственный технический
университет.
Перспективным путем повышения
качества функционирования автоматизированных электромеханических систем
является использование новых современных принципов автоматического управления –
адаптивного управления.
Наибольшее распространение среди
интеллектуальных технологий формирования адаптивных алгоритмов регулирования и
управления в области электропривода (ЭП) получила технология нечеткого
управления (Fuzzy-control) [1, 2].
В работе проведен сравнительный
анализ основных показателей качества переходного процесса для классической и
нечеткой систем управления с целью выявления преимуществ и недостатков
последней. Построены две модели систем управления: классическая двухконтурная
система стабилизации скорости двигатель постоянного тока – управляемый
выпрямитель (ДПТ-УВ) с ПИ-регулятором и система стабилизации ДПТ-УВ на основе
нечеткого регулятора скорости. Моделирование систем стабилизации и дальнейший
анализ переходных процессов осуществлялся с помощью среды моделирования Matlab
Simulink.
В качестве данных для расчета
применялись технические характеристики лабораторной установки, имеющейся в
распоряжении кафедры «Электрооборудование и автоматика судов» Астраханского
государственного технического университета. После проведения необходимых
математических расчетов и выбора наиболее оптимальных передаточных функций, для
каждого элемента была разработана полная функциональная схема классической
двухконтурной системы стабилизации скорости ДПТ-УВ (рис.1.):
Крупнокусковая тушенка оптом от завода! Высший сорт, выгодные цены, акции! mkzargo.ru испытательные системы its-tm.com
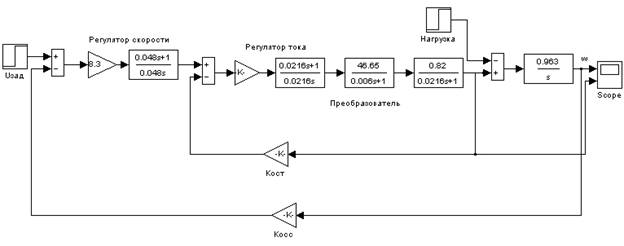
Рис. 1.
Полная функциональная схема двухконтурной системы стабилизации в среде моделирования
Matlab Simulink.
Для получения графиков переходных
процессов на основе модели классической системы стабилизации скорости был
проведен следующий опыт. Имеющиеся в составе построенной модели стандартные блоки
системы Matlab - генераторы
ступенчатого сигнала Step, которые
в данном случае выполняют роль задающего сигнала и нагрузки, позволяют изменять
свои величины в заданный момент времени. Благодаря этому, исследуемая модель
будет запущена в работу со следующими условиями:
1. Система запускается с сигналом
задания ![]() о.е. и под нагрузкой
о.е. и под нагрузкой ![]() о.е.
о.е.
2. В момент времени t = 7,5 с сигнал задания уменьшается вдвое.
3. В момент времени t = 15 с момент нагрузки возрастает.
При правильной настройке всех
параметров системы, ее реакция по скорости на отмеченные выше скачки сигнала
задания и нагрузки будет выглядеть следующим образом (рис. 2):
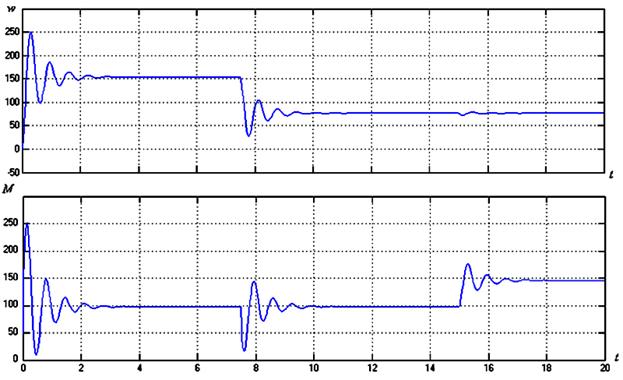
Рис.2.
График переходных процессов классической системы стабилизации скорости.
Далее была построена модель
системы стабилизации скорости ДПТ-УВ на основе нечеткого регулятора. Основные
принципы моделирования нечеткого регулятора скорости, при помощи пакета
расширения Fuzzy Logic Toolbox, для системы ДПТ-УВ описаны в статье [3].
Модель системы стабилизации
скорости ДПТ-УВ с нечетким регулятором, построенная с помощью среды
моделирования Matlab Simulink, представлена на рисунке:
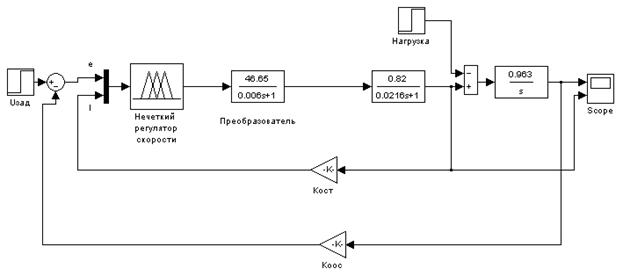
Рис. 3.
Модель системы стабилизации скорости ДПТ с нечетким регулятором.
Переходные процессы, полученные с
помощью данной модели, приведены на рисунке (рис. 4.):
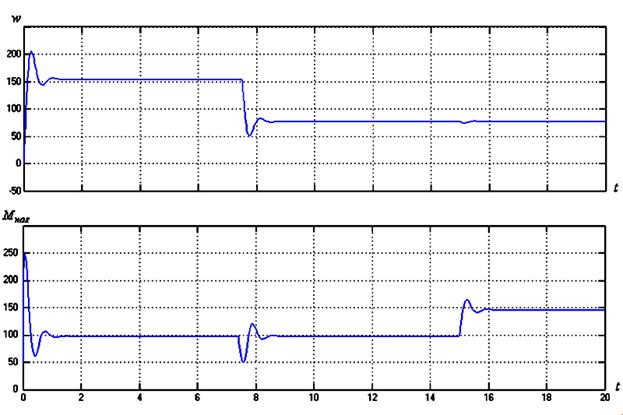
Рис. 4.
Графики переходных процессов для модели системы стабилизации с нечетким регулятором
скорости.
Далее проводился сравнительный
анализ основных показателей качества переходных процессов по полученным
графикам для построенных моделей.
Оценка качества переходных
процессов проведена по следующим основным показателям: время регулирования (![]() ); перерегулирование (
); перерегулирование (![]() ); частота колебаний; число колебаний (n), время достижения первого максимума (
); частота колебаний; число колебаний (n), время достижения первого максимума (![]() ); время нарастания переходного процесса (
); время нарастания переходного процесса (![]() ); декремент затухания (
); декремент затухания (![]() )
)
Переходные процессы по скорости
были рассмотрены для 3-х режимов:
1) переходной процесс при пуске
под нагрузкой (t = 0c);
2) переходной процесс в момент
времени t = 7.5с, когда сигнал
задания уменьшается вдвое;
3) переходной процесс в момент
времени t = 15с, когда нагрузка
возрастает.
Цифровой анализ качества
переходных процессов для исследуемых моделей, приведен в таблице 1:
Таблица
1.
Сравнительный
анализ графиков переходных процессов исследуемых моделей.
|
Осн. показ. качества п.п. |
Режим 1 |
Режим 2 |
Режим 3 |
|||
|
Класс. модель |
Нечеткая модель |
Класс. модель |
Нечеткая модель |
Класс. модель |
Нечеткая модель |
|
|
|
4 |
1.5 |
3 |
1.2 |
3 |
2 |
|
|
62.3 |
40 |
36.4 |
10.4 |
2.6 |
1.03 |
|
|
9.37 |
7.85 |
7.85 |
7.39 |
8.97 |
8.97 |
|
n |
5 |
2 |
4 |
2 |
5 |
3 |
|
|
0.25 |
0.27 |
0.7 |
0.6 |
0.5 |
0.5 |
|
|
0.18 |
0.13 |
0.3 |
0.5 |
0.3 |
0.35 |
|
|
3.23 |
19.3 |
3.5 |
4 |
2.5 |
8 |
По данным, приведенным в таблице,
можно сделать следующие выводы:
1. Для первого режима, при пуске
под нагрузкой – модель системы стабилизации скорости с нечетким регулятором
обеспечивает время переходного процесса по скорости меньше, чем классическая
модель (62%). Так же переходной процесс по скорости для модели с нечетким
регулятором отличается меньшими значениями величины перерегулирования (35%),
частоты (16.2%), числа колебаний (60%) и большей величиной декремента затухания
(83.3%).
2. Для второго режима, при скачке
сигнала задания – модель системы с нечетким регулятором обеспечивает на 30-35%
меньшие провалы по скорости, чем модель классической системы. При этом уменьшается
временем регулирования (практически в два раза) и число колебаний за время
регулирования (50%).
3. Для третьего режима, при
скачкообразном изменении нагрузки – модель системы стабилизации с нечетким
регулятором обеспечивает меньшие провалы по скорости (45-50%), чем классическая
модель, а также характеризуется меньшим значением временем регулирования (33 %)
и числа колебаний (40%).
На основании полученных в ходе
исследования результатов, можно сделать вывод, что замена классического
регулятора скорости, на регулятор идентичной структуры, но построенный по
принципам нечеткой логики приводит к существенному повышению качества
переходного процесса системы.
Литература
1. Макаров И.М., В.М. Лохин, С.В.
Манько, М.П. Романов Искусственный интеллект и интеллектуальные системы
управления/ Отделение информ. Технологий и вычислит. систем РАН. – М.: Наука,
2006. – 333с.
2. Зайцев А.И. Применение
нечетких систем управления в электроприводах./А.И. Зайцев, Г.Л. Муравьев, В.Л.
Сташнёв. – www.electro.nizniy.ru//
papers/4/00407.html.
3. Кабылбекова В.В, Кулахметов
Р.Ф, Надеев А.И. Нечеткие системы управления тиристорными электроприводами //
Датчики и системы, 2009. №5. С. 37-39.
Поступила
в редакцию 28.09.2009 г.