Некоторые особенности построения систем передачи
телеметрической информации
Пейсахович Даниил Григорьевич,
соискатель Самарского государственного аэрокосмического университета им. академика С.П. Королёва,
программист 3 категории ООО «АИС-Город».
Системы передачи телеметрической информации объединяют бортовую и наземную
телеметрические системы. А также радиолинию космический аппарат – Земля.
Бортовая телеметрическая система обеспечивает сбор информации от различных
служебных и научных датчиков, преобразует выходные сигналы этих датчиков в цифровую
форму, обеспечивает хранение информации в период между сеансами связи и формирование
единого цифрового потока двоичных данных.
Можно выделить три основных вида источника данных на космический аппарат
[1]:
–
системы космический аппарат (электропитание,
ориентации, управления, двигательная установка и др.);
–
низкоинформативные научные приборы;
–
высокоинформативные научные приборы (ТВ камеры,
оптико-механические сканеры и т.п.).
Эти источники информации, как правило, используют общую бортовую систему
сбора, преобразования и хранения информации и единую радиолинию космический аппарат
– Земля.
На Земле с выхода телеметрической системы передачи информации сообщения поступают
к разным потребителям. Данные о состоянии систем космический аппарат поступают
в группу анализа ЦУП. Научная информация используется различными научными
институтами. Информация от датчиков изображения используется как в интересах
управления космический аппарат, так и в интересах науки.
Характеристики телеметрической системы зависят от того, какие датчики информации
она обслуживает. Задачи системы передачи служебной ТМИ
сводятся к передачи сообщений о состоянии систем космический аппарат,
температура в отсеках космический аппарат, исполнение передаваемых функциональных
и числовых команд.
Запуск каждого нового космический аппарат является началом
лётно-конструкторских испытаний, так как практически все космический аппарат
отличаются друг от друга по решаемым задачам и, следовательно, имеют отличие в
системах космический аппарат и укомплектованы разными научными приборами.
Основным отличительным признаками системы передачи служебной ТМИ являются:
–
большая избыточность передаваемых сообщений;
–
невысокая точность измерения параметров;
–
большое число измеряемых параметров;
–
необходимость передачи данных в аварийном
состоянии космический аппарат (потеря ориентации, снижение мощности передатчика
и др.).
Требования минимизации массы и энергопотребления бортовой аппаратуры приводит
к необходимости создания единой бортовой ТМС, которая передаёт сообщение как от
датчиков состояния систем космический аппарат (служебная телеметрия), так и от
научных датчиков (научная телеметрия).
ТМИ передаётся кадрами (см. рис.
1) [2]. Обычно каждый кадр состоит из 128 8-ми разрядных слов, в начале каждого
кадра передаётся синхропосылка (СП), как правило состоящая
из 4х слов. Первое слово после СП несёт в себе значение номера ТМ кадра, в которую входит номер цифрового массива (ЦМ), передаваемого в
структуре ТМ кадра.
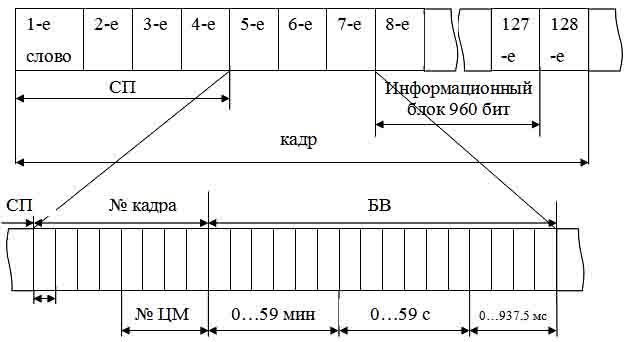
Рис. 1. Состав телеметрического кадра.
Порядок следования информационных слов в ТМ кадре однозначно определяется
номером кадра. При передачи
ЦМ в четырёх старших разрядах пятого слово записывается «0», шестое и седьмое
слова в кадре несут информацию о бортовом времени (БВ) от 0 до 59 минут. 6
старших разрядов 6-го слова могут принимать значения от 0 до 59 минут с
дискретом в 1 минуту.
2 младших разряда 6-го слова и 4 старших разряда 7-го слова могут принимать
значения от 0 до 59 с дискретом в 1 с.
4 младших разряда 7-го слова могут принимать значения от 0 до 15 (0-937,5
мс) с дискретом в 62,5 мс.
С 8-го по 127-е слово передаётся ТМИ.
Последнее слово в кадре – контрольная сумма. Она получается суммирование
2-чных слов всего кадра с учётом СП без переноса бита переполнения 8-ми
разрядной сетки.
ТМИ передаётся как безызбыточным кодом при малых скоростях передачи, так и
после кодирования свёрточным кодом (СК) с длиной кодового ограничения К=6 и кодовой скоростью R=1/2.
При выборе перспективных методов кодирования ТМИ
рассматриваются несколько возможных кодов:
–
каскадный код, состоящий из свёрточного кода К=6, R=1/2 и расширенного кода Боуза-Чоудхари-Хеквенгейма
(64;51;t=2);
–
свёрточный код с К=9,
R=1/3.
Требуемое отношение сигнал-шум на бит информации для обеспечения вероятности
ошибки 10-5 соответственно составляет 2,2 и 1,9.
Для сравнения, отношение Еб/N0 для СК
с К=6, R=1/2 равно 2,8.
Полагаем, что потери при демодуляции и синхронизации кодовых символов реально
не должны превышать 1 дБ. Для рекомендации одного из рассматриваемых методов
кодирования учтём следующие соображения:
–
наиболее помехоустойчивый из этих кодов –
свёрточный с К=9, R=1,3 – пригоден в основном для
программной реализации. Сложность аппаратурной реализации примерно в 8 раз
больше чем для свёрточного кода с К=6, R = 1,2;
–
каскадный код приходит к утроению – учетверению
сложности кодирующего устройства. Сложность декодирующего устройства
увеличивается незначительно. Учитывая, что энергетический выигрыш, на который
разменивается сложность, составляет 1 дБ, следует иметь убедительные причины
для его применения.
Бортовой комплекс ТМС (см. рис. 2) обеспечивает следующие режимы работы:
–
передачу в реальном времени в сеансе связи;
–
запоминание информации между сеансами связи;
–
передачу одной части информации в реальном времени
и одновременное запоминание другой части информации.
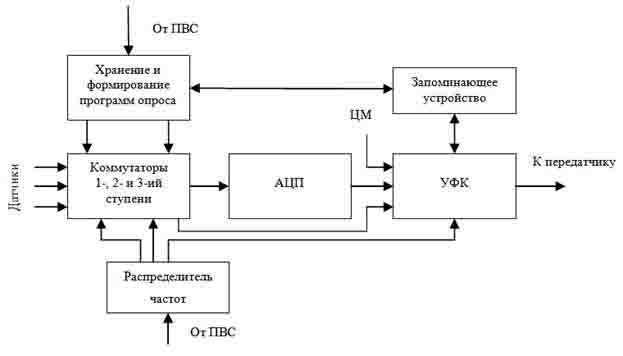
Рис. 2. Структурная схема бортового комплекса системы передачи телеметрической
информации.
Сигналы от датчиков поступают на входы коммутаторов. Программа опроса датчиков
находится в памяти устройства хранения и формирования. Аналоговые сигналы проходят
через АЦП и в устройстве формирования кадра УФК объединяются в единый цифровой
поток, который в реальном времени передаётся через радиолинию, в режиме запоминания
поступает старт-стопное запоминающее устройство. Все необходимые синхросигналы
бортовой комплекс получает от программно-временной системы (ПВС). Обработку
цифровых сообщений и управление режимами работы системы выполняет ЭВМ, входящая
в состав ТМС. Бортовой комплекс способен обрабатывать не только данные отдельных
датчиков, но и цифровые массивы, при этом поступающий на вход радиолинии
цифровой массив разделяется на стандартные кадры по 1024 бита. В каждом кадре
имеется СП.
В сеансе связи ТМИ, сначала передаётся в режиме воспроизведения с ПЗУ, а
затем реального времени. Типовой сеанс связи продолжается около 30 минут. При
необходимости передачи большого объёма данных сеанс может продолжаться до
нескольких часов в зависимости от возможности системы электропитания
космический аппарат.
Наземный комплекс предусматривает регистрацию принимаемой информации, чтобы
отказ в сеансе связи наземных систем синхронизации и декодирования, каналов
связи с ЦУП и т.п. не приводил к потере информации. Поэтому наземный комплекс (см. рис. 3) имеет несколько ступеней регистрации.
Для приёма ТМИ используется одна из двух антенн
комплекса космической связи: с диаметром зеркала 32 либо
Для сужения зоны поиска сигнала по частоте и снижения тем самым порогового
значения энергетического потенциала используются программируемые синтезаторы частоты,
позволяющие компенсировать известную часть доплеровского сдвига частоты принимаемого
сигнала. В системе используются мягкое декодирование по алгоритму Витерби [3].
При этом, с учётом потерь в реальном приёмном
устройстве при вероятности ошибочного приёма бита информации 10-4
требуется Еб/N0 = 3 с
учётом потерь на реализацию. После декодирования цифровые данные поступают на
схему выделения сигнала кадровой синхронизации и схему выделения результатов
измерения отдельных параметров.
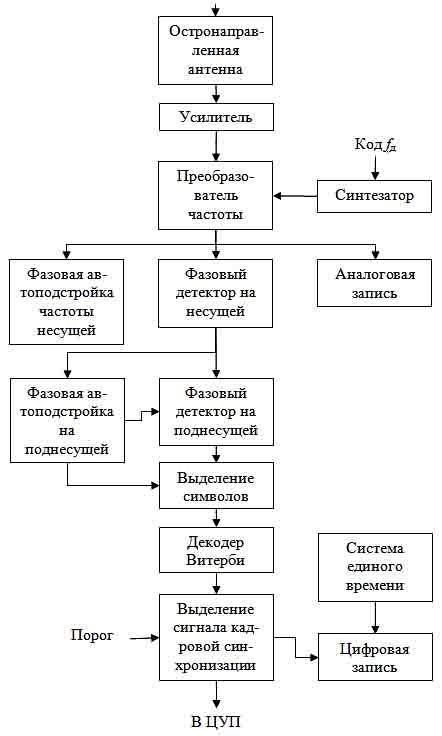
Рис. 3. Структурная схема наземного телеметрического комплекса.
Литература
1.
Ильин В.А. Телеуправление и телеизмерение [текст]:
М., 1982.
2.
Радиосистемы межпланетных космических аппаратов
[текст]: Под общей редакцией А. С.
Виницкого – М. – «Радио и Связь» 1993г.
3.
Хаусли Т. Системы
передачи и телеобработки данных [текст]: М. – 1994.
4.
Разработка программного обеспечения для
автоматизированного проектирования программы телеметрических измерений
модернизируемого изделия 11Ф695. Программа и методика испытаний [текст]: НТЦ
«Наука» –
Самара – 2002.
5.
Разработка программного обеспечения для
автоматизированного проектирования программы телеметрических измерений модернизируемого
изделия 11Ф695. Отчёт по результатам испытаний [текст]: НТЦ «Наука» – Самара –
2002.
Поступила в редакцию 20.07.2010 г.