О разработке автоматизированной системы для диагностирования состояния электроприводов горных машин
Семыкина Ирина Юрьевна,
кандидат технических наук, доцент, зав. кафедрой электропривода и автоматизации,
Кольцов Родион Арсеньевич,
аспирант,
Гаргаев Андрей Николаевич,
аспирант.
Кузбасский государственный технический университет им. Т.Ф. Горбачева.
Работа проводилась при финансовой поддержке Министерства образования и науки Российской Федерации в рамках Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы. Проект «Разработка энергоэффективных средств управления электроприводами горных машин с учетом особенностей динамических режимов их работы в рамках создания энергосберегающих систем распределения и потребления электроэнергии» (шифр 2011-1.2.2-226-011).
Введение
В целях повышения энергетической эффективности электроприводов (ЭП) горных машин (ГМ) наиболее действенным способом является использование в них регулируемых электродвигателей в сочетании с правильно подобранной системой управления. Однако данный способ является эффективным только в штатных режимах функционирования ЭП ГМ, в то время как существует определенный ряд неисправностей, таких как, например, межвитковое замыкание обмоток, которые не вызывают полного отказа ГМ, но значительно изменяют режим их работы, что вызывает в том числе дополнительные потери энергии, которые невозможно компенсировать средствами регулируемого электропривода.
В связи с этим, достаточно важной мерой в рамках повышения энергетической эффективности ЭП ГМ является дополнение их систем управления отдельным модулем, позволяющим диагностировать неисправное состояние двигателя, который поможет определить необходимость проведения ремонтных мероприятий в рамках системы технического обслуживания ГМ по фактическому состоянию, тем самым сберегая их ресурс на предотвращении полного отказа двигателя, а также энергию на избегании дополнительных потерь. Для реализации данной идеи на кафедре электропривода и автоматизации КузГТУ на основе лабораторного стенда по имитации горных машин [1] была создана автоматизированная система для диагностирования состояния электроприводов горных машин.
Назначение и возможности системы
Разработанная система предназначена для имитации различных механических нагрузок и исследования характеристик регулируемого электропривода с требуемым характером нагрузки, а также искусственного создания неисправностей электрических машин и настройки модуля диагностирования данных неисправностей.
Система позволяет получать информацию в графическом виде и в виде набора данных об электрических и механических координатах испытуемой и нагрузочной электрических машин в реальном времени. Данные, полученные в ходе работы системы, дают возможность оценить:
– показатели качества регулирования механических координат;
– переменные потери энергии в электрической машине, зависящие от нагрузки на валу;
– состояние электрических машин с помощью нейронных предикторов.
Состав, структура и реализация системы
Конструктивно система представляет собой стационарный стенд, основу которого составляют две электрические машины, одна из которых выступает в качестве испытуемой, а другая выполняет функции нагружающего устройства. Для более широкого спектра применения в электромашинную пару включен двигатель постоянного тока марки 4ПНМ 112 L04 и асинхронный двигатель марки АИР80А4. Электрические машины соединены жесткой механической связью, снабжены комплектом необходимых датчиков, индивидуальными системами управления и блоком защит.
Принцип работы нагружающей машины основан на формировании момента нагрузки на валу при помощи регулирования величины тока, протекающего по его обмоткам. Благодаря сочетанию режимов противовключения и динамического торможения нагружающая машина может реализовать любой тип статической нагрузки, а также программно заданный характер ее изменения.
Структурная схема системы изображена на рис. 1. Ее измерительная подсистема предназначена для измерения и последующего аналого-цифрового преобразования текущих параметров испытуемой и нагрузочной машин, а системы управления соответствующих машин включают промышленный преобразователь частоты для управления асинхронным двигателем, и широтно-импульсный преобразователь в сочетании с набором реостатов для управления двигателем постоянного тока. На персональном компьютере в графическом виде организовывается вывод информации о текущих показателях измеряемых координат, а также производится обработка данных в модуле диагностики электрических машин с помощью специально разработанного программного обеспечения.
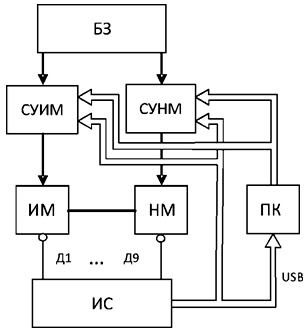
Рис. 1. Структурная схема системы: ИМ – испытуемая электрическая машина; НМ – нагрузочная электрическая машина; ИС – измерительная подсистема; Д1…Д9 – комплект датчиков; СУИМ, СУНМ – подсистемы силовой части и управления испытуемой и нагрузочной машинами; БЗ – блок защит; ПК – персональный компьютер.
С точки зрения технической реализации систем управления электродвигателями, силовая часть системы (рис. 2) включает в себя асинхронный двигатель M, питаемый от преобразователя частоты UZ, и машину постоянного тока G, с коммутирующими контакторами KM1 – KM3 и кнопочными средствами управления ими. Драйвер DD3 и IGBT-транзисторы VT1,VT2 образуют двухканальный широтно- импульсный преобразователь, регулирующий электромагнитный момент нагрузочной машины в соответствии с заданным типом нагрузки.
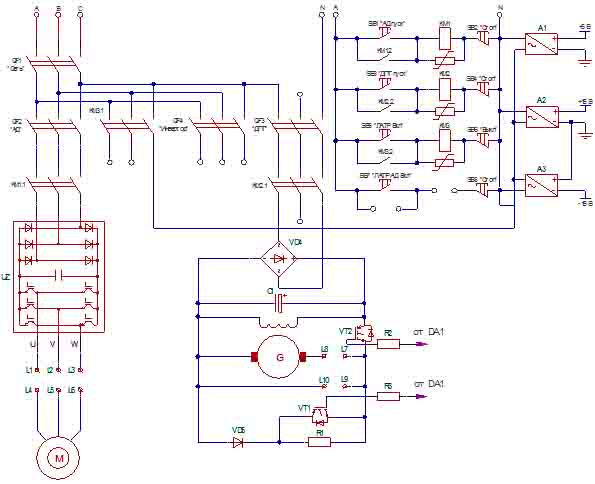
Рис. 2. Силовая часть системы.
Управляющая часть систем управления электродвигателями (рис. 3) содержит подсистему управления нагрузочной машиной, включающую управляющее устройство на базе микроконтроллерного модуля Freeduino Through-Hole DD1, переключателей для управления работой нагрузочной машины, а для реализации обратных связей задействован канал аналогово-цифрового преобразования ADC0 и вход захвата ICP микросхемы DD1.
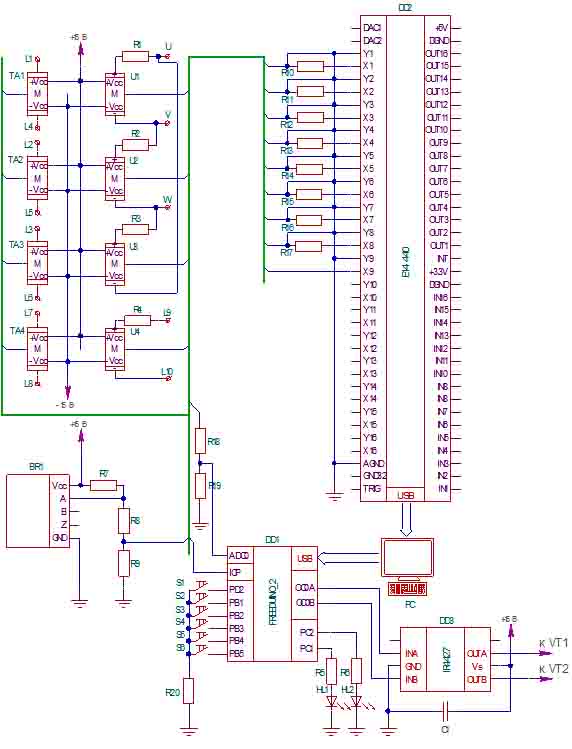
Рис. 3. Управляющая часть системы.
Предложенная система имеет ряд отличительных особенностей, среди которых возможность формирования активной нагрузки на валу двигателя, а также возможность задания программируемой нагрузки, использование гибкой модульной структуры системы, легкость подключения к персональному компьютеру и использования полученной информации для последующей обработки.
Для примера на рис. 4 приведены осциллограммы фазных токов и напряжений асинхронного двигателя, тока и напряжения якоря машины постоянного тока, скорости вала и момента нагрузки в режиме имитации работы электропривода с нагрузкой типа «вентиля торная характеристика».
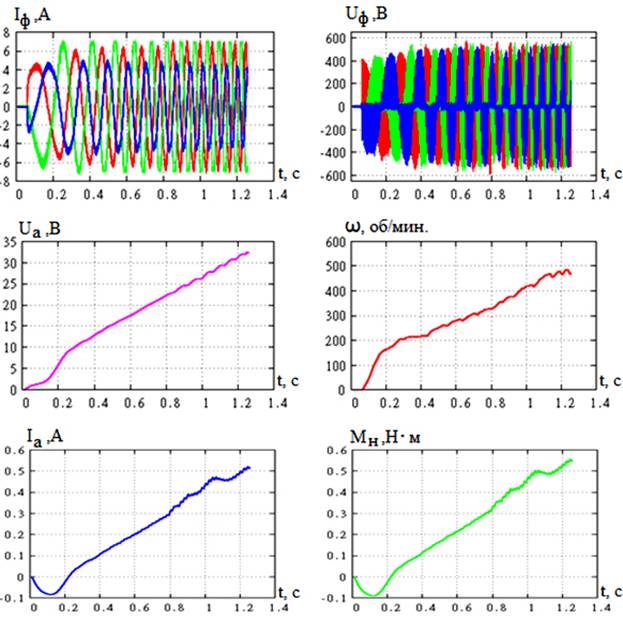
Рис. 4. Осциллограммы переменных величин электродвигателей.
Диагностирование состояния электроприводов
Уникальной особенностью разработанной системы является возможность диагностирования электрических машин с помощью нейронных предикторов [2]. Нейронный предиктор (рис. 5) это математическая модель на базе искусственной нейронной сети (ИНС), которая осуществляет предсказание выходного вектора состояния объекта по его предыстории на один шаг вперед. Для использования нейронного предиктора его необходимо обучить на данных, полученных от исправной электрической машины при ее работе в различных динамических режимах. При обучении нейронная сеть аппроксимирует функциональную зависимость между входными сигналами X и выходными Y. В качестве входных сигналов выступают напряжения на обмотках, угловая скорость и момент сопротивления, полученные в ИС от датчиков, и дополнительно те же сигналы, задержанные на некоторое время. Выходным сигналом является предсказанный на один шаг электрический ток в обмотке.
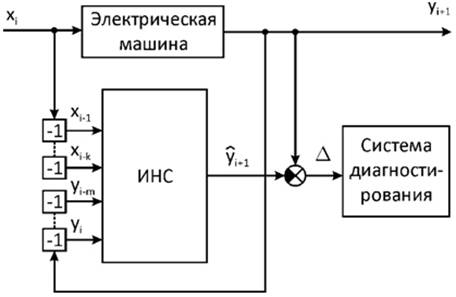
Рис. 5. Блок-схема нейронного предиктора.
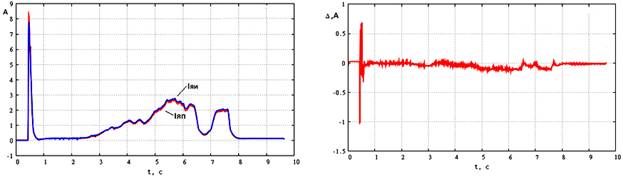
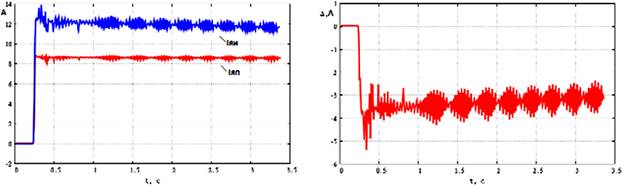
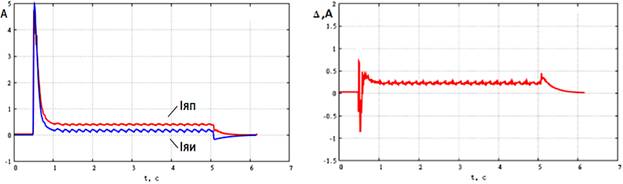
После обучения нейронный предиктор подключается к диагностируемой электрической машине. Точность предсказания предиктора зависит от времени обучения, объема и качества обучающей выборки. При исправном электродвигателе выходной сигнал предиктора практически совпадает с реально измеренным током (рис. 6), а в случае возникновения неисправности возникает рассогласование Δ (рис. 7, рис. 8). По величине и знаку рассогласования, а также скорости изменения величины рассогласования можно производить диагностику технического состояния электрической машины.
Анализ полученных результатов доказывает возможность использования ошибки нейронного предиктора для целей диагностирования. Нейронный предиктор адекватно работает для использованных в системе электродвигателей, а для диагностирования электродвигателей других типов необходимо отдельное обучение нейронных предикторов в процессе пуско-наладки.
а) б)
Рис. 6. Исправный двигатель: а) токи двигателя; б) рассогласование сигналов.
а) б)
Рис. 7. Замыкание секции обмотки: а) токи двигателя; б) рассогласование сигналов.
а) б)
Рис. 8. Обрыв секции обмотки: а) токи двигателя; б) рассогласование сигналов.
Таким образом, разработанная автоматизированная система может использоваться как для исследования регулируемых электроприводов и оценки их энергетических свойств, так и для диагностирования электродвигателей в системе с уже настроенным предиктором, а также для создания обучающих выборок, необходимых для настройки систем диагностирования электроприводов в промышленных условиях, в том числе для горных машин.
Литература
1. Семыкина И.Ю. Испытательный комплекс для оценки режимов работы электроприводов горных машин / И.Ю. Семыкина, А.В. Киселев, Р.А. Кольцов // Журнал научных публикаций аспирантов и докторантов. – 2012. – № 9(75). – С 82-87.
2. Гаргаев А.Н. Диагностика электроприводов карьерных экскаваторов на основе динамической идентификации электродвигателей: автореф. дис. … канд. техн. наук. – Кемерово, 2013. – 20 с.
Поступила в редакцию 07.05.2013 г.