Отслеживание перемещения объектов в системах идентификации для предотвращения повторного распознавания
Двойной Илья Ростиславович,
аспирант Пензенского государственного технологического университета,
инженер-программист ООО «Новая система».
Системы установления личности по изображению, получаемому с камеры видеонаблюдения, имеют широкий круг применения: в аэропортах, метро, на стадионах, на проходных предприятий или постах охраны. Однако обработка изображений занимает много времени, поэтому, требуется оптимизировать процесс распознавания. Одним из способов повышения производительности системы является использование алгоритма отслеживания перемещения, который позволяет предотвратить процесс многократного анализа одного и того же объекта содержащегося сразу на нескольких следующих друг за другом кадрах, получаемых от системы видеонаблюдения.
Так как с того момента как человек входит в поле зрения камеры и покидает его может пройти неограниченное количество времени, происходит многократный процесс установления его личности. Такое поведение системы является нежелательным, поскольку приводит к возникновению избыточной нагрузки. В случае применения алгоритма отслеживания перемещения возникает вопрос определения оптимальности изображения, передаваемого в систему распознавания. В ходе перемещения человека могут изменяться угол наклона и поворота его головы, могут возникать пересечения с другими объектами, из-за чего изображение, полученное в начальный момент времени может быть неоптимальным с точки зрения распознавания. Таким образом, необходимо производить оценку дополнительных признаков: наличие области глаз, носа, рта, бровей, геометрическая форма выделенной области. В случае если новое изображение в большей степени отвечает заданным критериям, производится замещение изображения находящегося в очереди. Это позволяет снизить нагрузку на систему установления личности, а также повысить качество получаемых результатов.
Алгоритм отслеживания перемещения строится на предположении о том, что за время, проходящее между сменой двух кадров, объект не может существенным образом изменить свою форму и положение в пространстве [1].
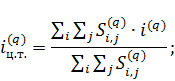
Для отслеживания положения объектов используются координаты центра тяжести, так как они статистически более устойчивы, чем координаты геометрического центра массы, поскольку для их вычисления используются интегральные характеристики: сумма абсолютных координат по ортогональным направлениям и площадь объекта. Для бинарного изображения координаты центра тяжести объекта определяются как:
 (1)
(1)
 (2)
(2)
![]() (3)
(3)
где Si,j(q) – элементы бинарного изображения для q-й локальной области; i(q), j(q) – коды координат для q-й локальной области [2].
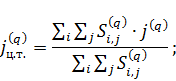
Для всех объектов, полученных после этапа сегментации, определяются координаты центра тяжести. Далее происходит поиск объекта на предшествующем изображении имеющего наиболее близкие координаты. Как видно из рис. 1 координаты центра тяжести для объекта при смене кадра меняются весьма незначительно, затруднение может возникнуть, только в случае пересечения двух объектов. Финальное решение о совпадении объектов на разных кадрах принимается после оценки степени сходства форм сопоставленных объектов. Наиболее точные результаты в данном случае дают методы контурного анализа.
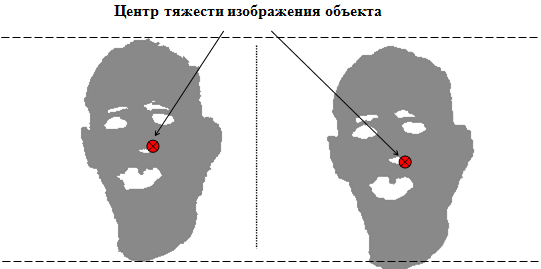
Рис. 1. Изменение координат центра тяжести объекта, при смене кадров.
Контуры плоских изображений задают не только формы этих изображений, но и содержат дополнительную информацию, связанную с масштабом и углом поворота. При установлении степени сходства формы двух изображений по их контурам эта информация позволяет однозначно оценить такое сходство. В связи с этим возникает задача нахождения комбинации параметров линейных преобразований изображения – масштаба |μ|, угла поворота ∆φ и сдвига d начальной точки контура, при которых расстояние R между контурами двух изображений становятся минимальными. Величина Rmin этого расстояния принимается в качестве меры сходства изображений по их форме [3, 4].
После обнаружения соответствия происходит сравнение качества выделенных объектов, по результатам которого принимается решение о необходимости замены изображения в очереди к подпрограмме установления личности. Схема описанного алгоритма представлена на рис. 2.
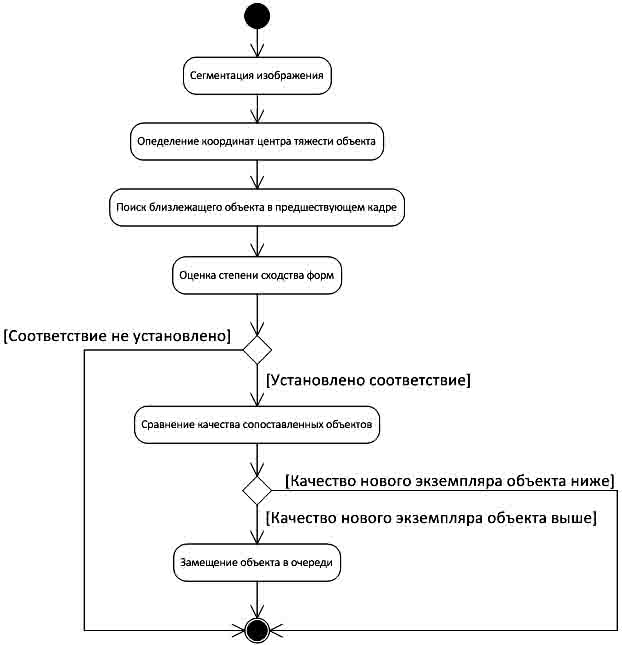
Рис. 2. Диаграмма активности алгоритма отслеживания перемещения.
Опыты по внедрению алгоритма отслеживания перемещения в систему установления личности показали уменьшение нагрузки на систему распознавания, в зависимости от интенсивности потока людей в месте расположения камеры, на 15-35%.
Литература
1. Гонсалес Р., Вудс Р. Цифровая обработка изображений. – М.: Техносфера, 2005. – 1072 с.
2. Сальников И.И. Анализ пространственно-временных параметров удаленных объектов в информационных технических системах. – М.: ФИЗМАТЛИТ, 2011. – 252 с.
3. Старовойтов В.В. Локальные геометрические методы цифровой обработки и анализа изображений. – Минск: Ин-т техн. кибернетики, 1997. – 284 с.
4. Фурман Я.А., Кревецкий А.В., Передреев А.К. и др. Введение в контурный анализ; приложения к обработке изображений и сигналов. – 2-е изд., испр. – М.: ФИЗМАТЛИТ, 2003. – 592 с.
Поступила в редакцию 05.11.2013 г.