Особенности гуморальных систем биорегуляции
Васильев Геннадий Федорович.
Известны системы биорегуляции. Эти системы относятся к динамическим системам, распространенным во всем материальном мире (см. [1] http://jurnal.org/articles/2013/filos24.html). Они содержат отрицательную обратную связь и способны, как результат, стабилизироваться в некотором состоянии равновесия.
В динамической системе имеются два взаимодействующих между собой механизма: исполнительный механизм (далее ИМ, в биологии – эффектор) и формирователь закона управления (далее ФЗУ, в биологии – сенсорный рецептор). ИМ в системе играет роль прямой цепи. Он управляется сигналом управления и обеспечивает необходимое значение регулируемой величины на своем выходе. ФЗУ в системе играет роль цепи обратной связи (не путать ФЗУ с датчиком обратной связи). ФЗУ управляется регулируемой величиной и обеспечивает необходимое значение сигнала управления (не путать сигнал управления с сигналом обратной связи).
Функционирование динамической системы сводится к поддержанию ИМ такого значения регулируемой величины (далее, РВ), при котором ФЗУ вырабатывает сигнал управления (далее, СУ), необходимый ИМ для поддержания именно этого значения регулируемой величины.
В динамических системах, имеющих место в биологических объектах, возможны два способа формирования закона управления: параметрический и алгоритмический (терминология автора). При параметрическом способе сигнал управления формируется непосредственно сенсорным рецептором, а при алгоритмическом – путем вычитания регулируемой величины, получаемой от эффектора, из сигнала задания, поступающего из системы верхнего уровня (далее, СВУ). СВУ – это система, управляющая рассматриваемой системой.
Таким образом, ФЗУ параметрической системы состоит из единственного элемента – сенсорного рецептора, а ФЗУ алгоритмической системы состоит из СВУ и устройства сравнения сигналов от СВУ (сигнал задания) и эффектора (регулируемая величина). В ФЗУ алгоритмической системы возможно наличие какого-либо преобразователя регулируемой величины в сигнал обратной связи. В этом случае сигнал управления получается вычитанием из сигнала задания сигнала обратной связи.
Следует отметить, что функция ФЗУ алгоритмической системы полностью совпадает с функцией ФЗУ параметрической системы, т.е. с функцией сенсорного рецептора. Подробнее о системах биорегуляции (статические характеристики, рабочие характеристики, повышающие и понижающие системы, состояние равновесия системы, возможность взаимного конвертирования параметрической и алгоритмической систем при анализе) можно познакомиться в [2].
| Знакомства для секса за деньги. знакомства для секса за деньги. yescort.ru |
В биологии последовательную цепь «сенсорный рецептор – эффектор» принято называть рефлекторной дугой. Концы этой дуги соединяются между собой через объект биорегуляции. Так и образуется параметрическая система биорегуляции, рефлекторно реагирующая на изменения в объекте регулирования.
В чистом виде параметрические системы вполне автономны, т.к. их ФЗУ содержит в своем составе элементы, имеющие определенный порог срабатывания, и реагируют рефлекторно в определенном направлении при достижении регулируемой величиной некоторого значения. Алгоритмические системы, напротив, являются целеустремленными. Цель для них формирует СВУ.
Однако организм является целостной системой и представляет собой иерархию подсистем. Поэтому любая система в той или иной мере управляется из СВУ, и, по мере появления новых знаний, отдельные параметрические системы, в конце концов, оказываются адаптивными и даже алгоритмическими. В настоящее время автор может сослаться лишь на одну публикацию [3], описывающую алгоритмическую систему биорегуляции в организме человека, см. http://jurnal.org/articles/2013/biol3.html.
Особенности любой системы биорегуляции обусловлены двумя важными свойствами живой материи:
1) отсутствие реверсивных эффекторов (увеличение и уменьшение значения регулируемой величины обеспечивается работой разных эффекторов);
2) клеточная структура живой материи.
В наибольшей степени влияние этих особенностей проявляется в гуморальных параметрических системах биорегуляции. Описанию этих особенностей и посвящена настоящая статья.
В организме параметрических систем биорегуляции различных уровней бесчисленное множество, но принципиальных отличий, с точки зрения кибернетики, между ними нет. Поэтому их функционирование можно рассмотреть на примере какой-либо одной, и хорошо исследованной системы. В статье для примера выбрана система снабжения организма глюкозой. Для акцентирования внимания читателя на системных особенностях, физически система упрощена и рассматривается на качественном уровне.
Глюкоза из кишечника через печень поступает в кровь. Поступление глюкозы в организм осуществляется неравномерно. Неравномерно и несогласованно с поступлением осуществляется и потребление глюкозы тканями. Но в крови, обеспечивающей распределение глюкозы по потребителям, концентрация глюкозы должна быть ограничена некоторыми рамками (транспортировочный ресурс крови оптимально распределяется между многими важными для организма веществами). Такое ограничение обеспечивается контролем максимально и минимально допустимых значений концентрации глюкозы в крови и использованием специальных оперативных (печень, мышечная ткань) и долговременных (жировая ткань) накопителей глюкозы в соответствующей форме. Для решения этих задач организму необходимо:
1) обеспечить эффективное ограничение параметра;
2) согласовать взаимодействие систем регуляции, ограничивающих диапазон изменения общего для них параметра, не допустив конфликта.
Обе эти задачи решаются лишь одним свойством ФЗУ (сенсорных рецепторов) взаимодействующих систем, а именно, существенной нелинейностью их статических характеристик.
Каждая клетка сенсорного рецептора имеет порог возбуждения. При раздражении клетки, она скачком переходит из невозбужденного состояния в возбужденное. Т.е. статическая характеристика каждой клетки сенсорного рецептора прямоугольная. Но клеток много (возможно, тысячи), и у каждой клетки свой порог возбуждения (имеет место нормальное распределение значения величины порога возбуждения). При возбуждении рецептора, гормон поступает в кровь. Сначала в кровь поступает гормон от клеток с низким порогом возбуждения, потом добавляется гормон от клеток с более высоким порогом возбуждения. Вся продукция клеток накапливается в крови, как в интеграторе. Таким образом, при интегрировании в крови получается сглаженная нелинейная характеристика ФЗУ, форма которой соответствует распределению количества клеток с различным порогом возбуждения.
На рис. 1 и 2 приведены типовые рабочие характеристики гуморальных систем, соответственно, повышающей и понижающей. Повышающая система (рис. 1) соответствует в нашем примере системе с ФЗУ из Альфа-клеток поджелудочной железы и глюкагоном в качестве сигнала управления. Понижающая система (рис. 2) соответствует системе с ФЗУ из Бета-клеток поджелудочной железы и инсулином в качестве сигнала управления.
На рисунках видно, что характеристика каждого из ФЗУ имеет две зоны. Зона безразличия (слева от точки равновесия системы) и зона регуляции (справа от точки равновесия системы).
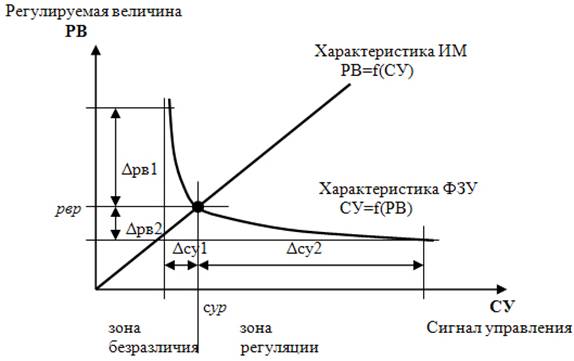
Рис. 1. Рабочая характеристика повышающей гуморальной системы: рвр – значение регулируемой величины в состоянии равновесия системы; сур – значение сигнала управления в состоянии равновесия системы.
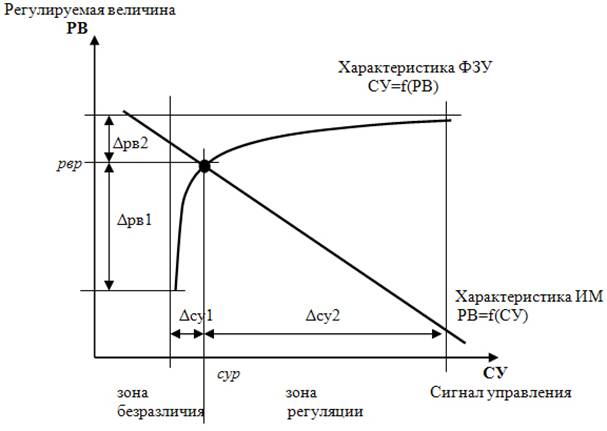
Рис. 2. Рабочая характеристика понижающей гуморальной системы: рвр – значение регулируемой величины в состоянии равновесия системы; сур – значение сигнала управления в состоянии равновесия системы.
В зоне безразличия ФЗУ имеет невысокий коэффициент передачи (Δсу1/Δрв1 <<1), т.к. изменение регулируемой величины в широком диапазоне приводит к незначительному изменению сигнала управления. Таким образом, если в повышающей системе (рис. 1) концентрация глюкозы выше точки равновесия системы, то она вмешиваться в регуляцию не будет. Если в понижающей системе (рис. 2) концентрация глюкозы ниже точки равновесия системы, то и она вмешиваться в регуляцию не будет. При этом глюкоза без всякого форсирования будет поступать из печени в кровь, и потребляться тканями организма по мере необходимости. В этом режиме концентрация глюкозы в крови будет определяться совместным действием слабых сигналов управления и факторами возмущения, и изменяться в некотором допустимом диапазоне.
В зоне регуляции ФЗУ имеет очень высокий коэффициент передачи (Δсу2/Δрв2>>1), т.к. даже небольшие изменения регулируемой величины приводят к значительному изменению сигнала управления. Таким образом, если в повышающей системе (рис. 1) концентрация глюкозы ниже точки равновесия системы, то она эффективно начнет повышать концентрацию, а понижающая система останется в зоне безразличия. Если же в понижающей системе (рис. 2) концентрация глюкозы выше точки равновесия системы, то уже она эффективно начнет понижать концентрацию, а повышающая система останется в зоне безразличия. При этом в первом случае глюкоза будет поступать в кровь из накопителей, а во втором – из крови в накопители.
Так существенная нелинейность характеристики ФЗУ обеспечивает переключение высокого и низкого коэффициента передачи, и бесконфликтное взаимодействие повышающей и понижающей систем.
Что касается преобразования множества сигналов от клеток сенсорного рецептора в общий сигнал управления от ФЗУ, то в гуморальных параметрических системах эта проблема решается очень просто и эффективно, так как кровь это идеальный интегратор. Однако эта простота создала другую проблему. Как следует из приведенного ранее описания системы, стабильность контролируемого значения регулируемой величины зависит от стабильности статических характеристик ИМ и ФЗУ системы. Но, поскольку ФЗУ гуморальной системы содержит интегратор, а, как известно, интегратор не имеет статической характеристики, то система оказывается неработоспособной. Интегратор в контуре системы полностью парализует ее работу (по мере возбуждения сенсорного рецептора, концентрация гормона в крови только возрастает). Если не предпринять мер, система, начав работать, постепенно войдет в состояние насыщения. Такая система регуляцию не обеспечивает.
Необходимо отметить, что этой проблемы в нейронных параметрических системах не существует, т.к. там сигнал управления не накапливается, а преобразование сигналов управления отдельных сенсорных клеток в общий сигнал управления ФЗУ решается логическим путем, возможно в ганглиях.
Для обеспечения работоспособности гуморальной системы, природа создала механизм дезактивации использованного гормона (далее, МДГ). При этом сенсорный рецептор обладает функцией положительного интеграла, а МДГ – отрицательного интеграла. При адекватной настройке, вместе они образуют элемент системы с более или менее стабильной передаточной функцией. Таким образом, статическая характеристика гуморального ФЗУ определяется не его физическими параметрами, а функционально. Учитывая это, будем называть передаточную характеристику ФЗУ гуморальной системы квазистатической.
В литературе не удалось найти какие-либо отчеты по исследованиям влияния свойств МДГ на характеристики ФЗУ. Однако настоящий анализ показывает, что любая нестабильность в функционировании МДГ может изменить режим работы системы, что существенно повлияет на работу гуморальной системы регуляции. Рассмотрим это подробнее.
Итак, квазистатическая характеристика гуморального ФЗУ представляет собой статическую характеристику сенсорного рецептора, смещенную вдоль оси СУ. Величина смещения определяется накопленным в крови еще не дезактивированным гормоном и, следовательно, зависит от эффективности работы МДГ.
На рис. 3 и 4 изображены типовые рабочие характеристики, соответственно, повышающей и понижающей системы регуляции. Показаны изменения положения точки равновесия системы при отклонении эффективности работы МДГ от нормы.
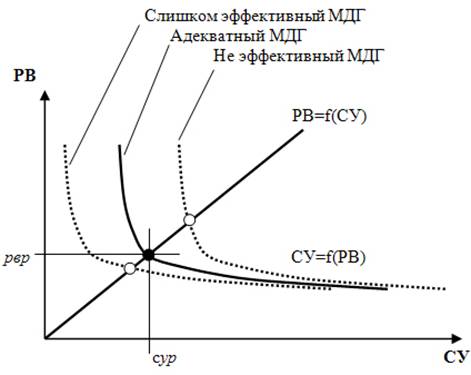
Рис. 3. Рабочая характеристика повышающей гуморальной системы. Изменение положения точки равновесия системы в зависимости от эффективности МДГ.
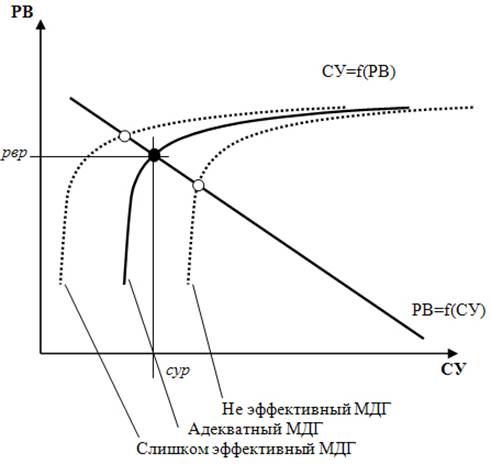
Рис. 4. Рабочая характеристика понижающей гуморальной системы. Изменение положения точки равновесия системы в зависимости от эффективности МДГ.
Так, если эффективность работы МДГ условно соответствует норме, то и квазистатическая характеристика ФЗУ будет соответствовать норме (сплошная линия). В этом случае и параметры системы (РВ и СУ) в точке равновесия будут соответствовать норме.
Если эффективность работы МДГ превысит норму (слишком эффективный МДГ), то квазистатическая характеристика ФЗУ, вследствие уменьшения исходного количества гормона в крови, сместится параллельно оси СУ ближе к нулю. Тогда точка равновесия повышающей системы (в нашем примере это система с глюкагоном) несколько понизится, а точка равновесия понижающей системы (в нашем примере это система с инсулином) – повысится.
Если эффективность работы МДГ окажется ниже нормы (не эффективный МДГ), то квазистатическая характеристика ФЗУ, вследствие увеличения исходного количества гормона в крови, сместится параллельно оси СУ в сторону увеличения. Тогда точка равновесия повышающей системы (система с глюкагоном) повысится, а точка равновесия понижающей системы (система с инсулином) – понизится.
Таким образом, эффективность работы обоих МДГ определяет допустимый диапазон изменения регулируемой величины (настройка системы). В таблице 1 приведены результаты морфологического анализа возможных вариантов. Здесь, возможный диапазон изменения регулируемой величины показан в виде вертикальных столбиков (светлые столбики). Рядом для сравнения приводится столбик (темные столбики), соответствующий норме. Все величины в относительном виде.
Таблица 1.
Гипотетический диапазон (высота столбика) изменения концентрации глюкозы в крови при различной активности МДГ систем с инсулином и с глюкагоном (светлый столбик) в относительном виде по сравнению с общепринятой нормой (темный столбик).
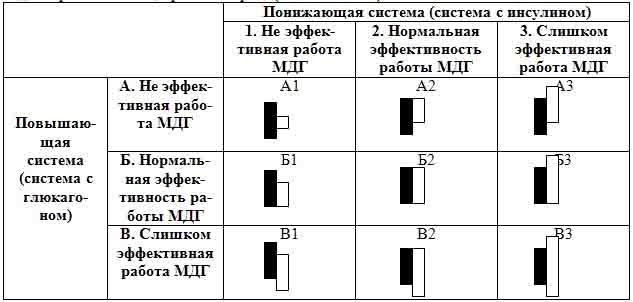
Для пояснения расшифруем некоторые режимы нашего примера:
Режим А1: неэффективная работа МДГ системы глюкагона повышает ее порог срабатывания, а неэффективная работа МДГ системы инсулина понижает ее порог срабатывания. Это создает комплекс, ведущий к ожирению.
Режим А3: неэффективная работа МДГ системы глюкагона повышает ее порог срабатывания, а слишком эффективная работа МДГ системы инсулина повышает ее порог срабатывания. Это создает комплекс, ведущий к гипергликемии.
Режим В1: слишком эффективная работа МДГ системы глюкагона понижает ее порог срабатывания, а неэффективная работа МДГ системы инсулина понижает ее порог срабатывания. Это создает комплекс, ведущий к гиперинсулинии и гипогликемии.
Несмотря на то, что настоящая таблица составлена для системы снабжения организма глюкозой, она (таблица) может иметь диагностическое значение для практикующих врачей, занимающихся различными гуморальными системами биорегуляции.
Из сказанного можно сделать следующие выводы:
1. В норме, управляя эффективностью работы механизма дезактивации гормона, системы верхнего уровня регуляции могут оптимизировать настройку гуморальных систем (адаптация).
2. При значительных отклонениях в работе механизма дезактивации гормона, в организме могут возникать разнообразные хронические патологии.
Литература
1. Васильев Г.Ф., Место для кибернетики // Журнал научных публикаций аспирантов и докторантов, Курск. – 2013, - №8, - с. 89-92.
2. Васильев Г.Ф., Кибернетика и биология // Биофизика, 2013, том. 58, вып. 4, с. 732-736.
3. Васильев Г.Ф., Явление саморегуляции двигательной единицы // Журнал научных публикаций аспирантов и докторантов, Курск. – 2013, - №3, - с. 160-164.
Поступила в редакцию 18.08.2014 г.