Основные структуры адаптивных систем управления и классификация
Сапожников Александр Владимирович,
аспирант Тверского государственного технического университета.
Построение систем управления, выполняющих адаптивные функции, основано на идентификации (или оценивании) текущих значений параметров или характеристик объекта и в соответствии с этим – на последующей перестройке параметров регуляторов систем. Главной проблемой здесь является осуществление идентификации за возможно малое время, желательно в темпе, близком к темпу реальных динамических процессов. В простейших системах управления это удается контролем характеристик, либо параметров системы. Идентификация в адаптивных системах такого уровня ограничена одним-двумя контролируемыми параметрами и осуществляется на основе прямых и косвенных измерений необходимых переменных (использование датчиков или вычислительных блоков). Позднее идентификационный подход стал развиваться на основе использования в адаптивных системах настраиваемых моделей, идентифицирующих недоступные измерению текущие параметры и переменные. Мера качества идентификации связывается с экстремизацией (чаще всего минимизацией) некоторой оценочной функции – функции качества (ФК). Процесс минимизации ФК связан с изменением параметров модели (параметрическая настройка) или введением дополнительных адаптирующих сигналов от некоторого адаптивного блока (сигнальная настройка).
Вычислительный процесс минимизации ФК является составной частью алгоритма адаптивной идентификации. Другой вычислительный процесс относится к управлению, в результате которого вычисляются и изменяются параметры регулятора системы или формируется дополнительный адаптирующий сигнал на входе системы на основе информации, получаемой от адаптивной идентификации. Таким образом, в идентификационных адаптивных системах присутствуют два процесса адаптации: по идентификации и управлению. Настраиваемая модель как блок может по-разному согласовываться с идентифицируемым объектом, а именно: параллельное соединение, последовательное и смешанное. Кроме того, возможно подключение модели к частям объекта [3]. При параллельном соединении не требуется, как в остальных случаях, введение дополнительных динамических блоков (дифференциалов) для реализации операторов, обратных оператору идентифицируемой части системы или объекта. Этот вариант соединения обеспечивает наибольшую простоту системы управления, поэтому примем его для построения адаптивной системы управления ТО с запаздыванием, как наиболее рациональный.
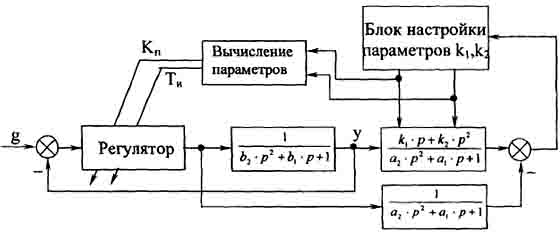
Рис. 1. Адаптивная система с последовательной настраиваемой моделью.

Рис. 2. Адаптивная система с параллельной настраиваемой моделью.
Вариант последовательного соединения показан на рис. 1, параллельного соединения - на рис. 2. Таким образом, многие практические разработки адаптивных систем можно объединить в структуру адаптивной системы с настраиваемой моделью (АСНМ).
Другой подход в построении адаптивных систем управления технологическими объектами связан с использованием блока эталонной модели, которой «подчиняется» движение всей системы управления или ее части. В ранних разработках адаптивных систем с эталонной моделью выделяются системы с предварительным фильтром (рис. 3), а также адаптивные системы с параллельным включением эталонной модели относительно адаптируемой системы [5], показанные на рис. 4. В системе с предварительным фильтром главной задачей является достижение «почти» безинерционного поведения системы, на фоне которого динамика эталонной модели, включенной перед системой, является «преобладающей» [1]. Применение адаптивной системы с параллельным включением эталонной модели сняло ограничения на применение этой модели, заключающиеся в сложности описания (порядок) объекта, которые имели место в разработках систем с предварительным фильтром.
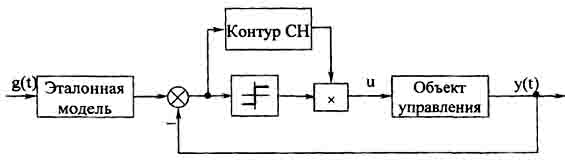
Рис. 3. Адаптивная система с предварительным фильтром.
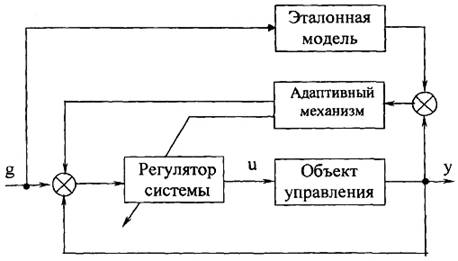
Рис. 4. Адаптивная система с параллельным включением эталонной модели.
Однако не до конца исследован вопрос устойчивости адаптивных процессов. Кроме того, при разработке адаптивных систем с эталонной моделью возникает проблема выбора эталонной модели. Очень важно то, что в этих системах по сравнению с АСНМ настройка осуществляется без предварительной идентификации. Мера «близости» движения системы к эталонной модели оценивается также соответствующей ФК, минимизируемой в ходе адаптации через настройку параметров регулятора (параметрическая адаптация) или введением дополнительного адаптирующего сигнала (сигнальная адаптация). Таким образом, многие разработки адаптивных систем можно объединить в структуру адаптивной системы с эталонной моделью (АСЭМ) [6], приведенную на рис. 5.
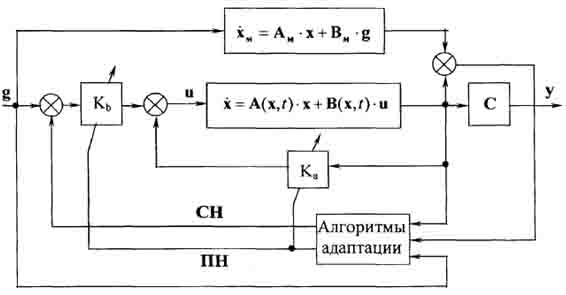
Рис. 5. Структурная схема АСЭМ с ПН и СН.
Адаптивные системы различаются по типу адаптации. Существуют поисковый и беспоисковый типы адаптации [2, 4]. Поскольку вычисление изменения значения ФК, как правило, затруднено, то такая задача облегчается введением поисковых движений, на которых оценивается приращение ФК. Очевидно, что в поисковой адаптации требуется время на оценивание текущего значения ФК, которое желательно бы сократить до минимума. Этому требованию отвечает беспоисковая адаптация, в которой вычисление текущей ФК осуществляется непосредственно, а именно, введение эталонной (настраиваемой) модели дает о реальном времени возможность текущего оценивания ФК адаптивных процессов. Работоспособность АСЭМ и АСНМ основана на следующих очевидных предположениях [5].
Идеальный случай:
1) ОУ – линейный;
2) эталонная модель – линейная и стационарная система (для АСЭМ);
3) модель и система (объект) одинакового порядка;
4) на интервале адаптации параметры изменяются только под воздействием адаптивного механизма (условие квазистационарности);
5) существует такое число настраиваемых параметров регулятора (модели), по которому адаптивное управление замкнуто;
6) из внешних сигналов на адаптивную систему действуют только входные сигналы управления;
7) исходные значения настраиваемых параметров перед моментом функционирования адаптивной системы неизвестны;
8) вектор состояния системы (объекта) доступен измерению по всем компонентам.
Реальные ситуации соответствуют общему случаю, когда предположения для идеального случая либо не выполняются, либо нарущаются.
Общий случай:
1) эталонная модель является нелинейной и нестационарной системой;
2) настраиваемая (идентифицирующая) система содержит нелинейности;
3) порядки модели и объекта не совпадают;
4) по всем настраиваемым параметрам адаптивная система может быть незамкнута;
5) в ходе адаптации параметры объекта изменяются (не выполняется условие квазистационарности);
6) в системе действуют внешние возмущения;
7) измерения компонент вектора состояния объекта производятся с аддитивным шумом.
Предположения для общего случая, однако, могут расходиться для АСЭМ и АСНМ в отличие от идеального случая: например. Эталонная модель выбирается меньшего порядка, чем объект. Предположение по четвертому пункту для общего случая относится практически только к АСЭМ. Исходя из проведенного анализа имеющихся адаптивных систем, можно выделить структуры адаптивных систем управления, которые более всего подходят для построения адаптивных систем управления технологическими объектами с запаздыванием, а также выделить эффективный по скорости протекания адаптивных процессов принцип адаптации.
Литература
1. Блейклок Д.Г. Автоматическое управление самолетами и ракетами. - М.: Машиностроение, 1969. - 286 с.
2. Костюк В.И. Беспоисковые самонастраивающиеся системы. - Киев: Техника, 1969. - 275 с.
3. Ландау И.Д. Адаптивные системы с эталонной моделью (АСЭМ). Что можно получит с их помощью и почему (обзор)? // Труды американского общества инженеров-механиков. Серия G. - 1972. - № 2. - С. 31-47.
4. Солодовников В.В., Шрамко Л.С. Расчет и проектирование аналитическихсамонастраивающихся систем с эталонными моделями. - М.: Машиностроение, 1972. - 270 с.
5. Landau I.D. Adoptive Control. The model reference approach. - New York: Basel. Marcel Decker, 1979. - 406 p.
6. Narendra K.S., Valavani L.S. Direct and indirect adaptive control // Automatica. - 1979. - Vol. 15. - № 6. - P. 653-664.
Поступила в редакцию 24.04.2014 г.