Автоматизированная система определения исполнительной схемы заземляющих устройств электрических подстанций
Бачурин Павел Николаевич,
студент магистратуры Владимирского государственного университета,
инженер-технолог ОАО «Владимирское производственное объединение «Точмаш».
Основой заземляющего устройства электрической подстанции является заземлитель, представляющий собой систему неизолированных проводников, находящихся в контакте с землёй и предназначенных для проведения тока в землю. Конструктивно заземлитель открытых распределительных устройств электростанций и подстанций выполняется в виде замкнутой сетки из стальных прутков или шинок. Заземляющую сетку сооружают на территории расположения оборудования подстанции в земле на глубине 0,5 – 0,7 м и она состоит из продольных и поперечных горизонтальных заземлителей, дополняемых по внешнему контуру вертикальными заземлителями (электродами) [1].
При ремонте оборудования подстанции одновременно ремонтируют заземляющую сеть. Ремонт заземления состоит в проверке сварных швов, соединяющих его отдельные участки. При обнаружении дефекта сварной шов вырубают зубилом и заваривают вновь электрической, автогенной или термитной сваркой [2].
Трассы прокладки заземлителя и заземляющих проводников в грунте определяют с помощью специальных приборов, позволяющих найти местоположение и глубину залегания подземных коммуникаций. Для определения трассы прокладки заземлителя источник переменного тока подключают к различным удаленным друг от друга точкам заземляющего устройства (ЗУ), как показано на рисунке 1.
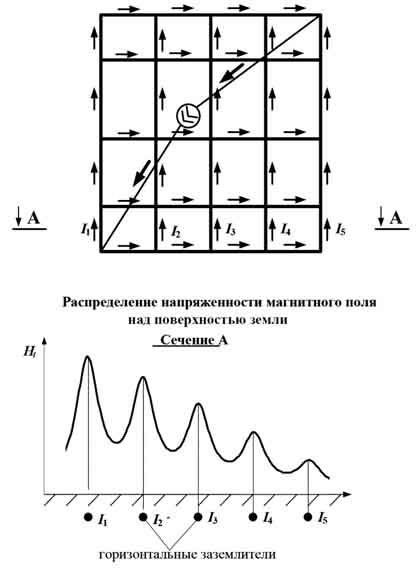
Рис. 1. Определение трассы прокладки заземлителей.
С помощью датчика магнитного поля определяют места прокладки и соединений поперечных и продольных заземлителей. Определяют глубину залегания горизонтальных заземлителей и подземных связей. Для этого с помощью датчика магнитного поля у поверхности земли фиксируется значение напряженности H = H1. Датчик магнитного поля поднимается над землей на высоту h1, при которой индикатор магнитного поля будет показывать значение H = 0,5H1. Глубина залегания проводника заземлителя lз= h1 [3]. Собранные сведения представляют в виде исполнительной схемы.
Составление исполнительной схемы требует проведения работ на местности, при этом оформление соответствующей документации осуществляется параллельно процессу определения формы, размера и положения заземляющего устройства. Использование бумажных носителей крайне неудобно, так как качество результирующей документации напрямую зависит от погодных условий, компетенций сотрудников и других факторов. Задачей настоящей работы является автоматизация процесса определения исполнительной схемы заземляющего устройства.
Для автоматизации геодезических полевых измерений и съемок применяются, в основном, следующие геодезические приборы: электронные тахеометры, лазерные сканирующие системы, цифровые аэрофотосъемочные комплексы, электронные теодолиты, лазерные дальномеры, в том числе безотражательные, электронные (цифровые) нивелиры и глобальные навигационные спутниковые системы (ГНСС) [4]. Главным условием при выборе того или иного варианта решения задачи является удобство использования приборов в полевых условиях. Следующими по значимости параметрами будут точность измерений, скорость проведения работ, удобство использования выходной информации.
Все современные электронные тахеометры обладают достаточными средствами для измерения расстояний и угловых размеров. Для того чтобы измерить угол между двумя линейными объектами, прибор устанавливается в вершине этого угла. Для измерения расстояния до точки достаточно направить прибор на эту точку. Существенным недостатком такого варианта решения задачи является необходимость «запоминания» точек, для которых проводятся измерения и точек, в которые устанавливается электронный тахеометр (если их число равно двум и более).
Следующий вариант – применение лазерной сканирующей системы. В зависимости от способа базирования прибора различают наземные сканеры и аппараты для аэрофотосъемки (на летательных аппаратах). Такие системы в нашем случае более удобны, чем электронные тахеометры, однако их применение также допускает ряд недостатков. Заземляющее устройство находится в грунте и обычно не имеет видимых над поверхностью земли элементов. Для того чтобы сканер воспринял форму и размеры ЗУ, требуется обозначить точки – места измерений какими-либо визуально различимыми физическими объектами. При обработке собранной информации эти объекты необходимо выделить на фоне избыточной информации, что также затрудняет процесс.
В ГНСС положение объектов задаётся координатами в принятой координатной системе. Такое представление информации об объектах нельзя назвать недостатком, так как между любыми двумя точками в системе координат нетрудно вычислить расстояние и, более того, зная конкретные координаты, легче выполнить привязку к карте поверхности планеты. Системы глобального позиционирования имеют явное преимущество перед другими средствами автоматизации измерений на местности, поэтому их применение для решения поставленной задачи будет наиболее логичным и целесообразным.
Современный уровень развития систем позиционирования позволяет промышленности выпускать устройства и комплексы, обеспечивающие точность определения координат до 3…5 мм. [5]. Это возможно при использовании технологии RTK (Real Time Kinematic, кинематика в реальном времени). Принцип работы RTK-системы следующий. В состав оборудования входят базовая и передвижная станции, каждая из которых состоит из спутникового приемника, передающей антенны (для базового приемника), радиомодема и приемной антенны (для подвижного приемника). Во время работы базовая станция с заранее известными координатами вычисляет поправки (на основе сравнения собственных координат с измеренными) и передает в эфир комбинированные сообщения для коррекции спутниковых измерений по радиоканалу. Подвижные приёмники, используя эти поправки, практически исключают неточности в измерениях дальностей до спутников [6].
Среди множества устройств точного позиционирования, предлагаемых на рынке, требуется отыскать такой минимальный набор, который обеспечит полную функциональность всей системы. Среди главных требований при выборе RTK-устройств можно выделить минимальную стоимость и максимальное соответствие обозначенным потребностям. Для более наглядного сравнения характеристик приборов вся информация о них сведена в таблицы 1 и 2. Знак «+» означает наличие функции в стандартной комплектации устройства. Обозначение «оп.» указывает на необходимость дополнительного заказа опции (соответственно, цена устройства будет возрастать).
Таблица 1.
Базовые станции.
|
Фирма-производитель, название
Основные характеристики |
Trimble NetR9 |
Topcon NET-G3 |
Spectra Precision ProFlex 800 |
GeoMax Zenith 10 (GSM+UHF) |
Javad Sigma-G3T |
SatLab SL500 |
|
|
Приём сигналов различных СНС |
GPS |
+ |
+ |
+ |
+ |
+ |
+ |
|
ГЛОНАСС |
+ |
+ |
+ |
+ |
+ |
+ |
|
|
Galileo |
+ |
+ |
+ |
|
оп. |
+ |
|
|
Интерфейсы связи |
Радиоканал |
|
|
|
+ |
оп. |
+ |
|
GSM/GPRS |
|
|
+ |
+ |
оп. |
+ |
|
|
Bluetooth |
+ |
|
+ |
+ |
оп. |
+ |
|
|
USB |
+ |
+ |
+ |
+ |
+ |
+ |
|
|
RS-232 |
|
+ |
+ |
+ |
+ |
+ |
|
|
Ethernet |
+ |
+ |
+ |
|
оп. |
|
|
|
Точность статич. измерений, мм |
В плане |
3 |
3 |
3 |
5 |
3 |
10 |
|
По высоте |
3,5 |
5 |
3,5 |
10 |
3,5 |
20 |
|
|
Габариты, мм |
Длина |
265 |
275 |
215 |
188 |
190 |
195 |
|
Ширина |
130 |
166 |
200 |
188 |
132 |
195 |
|
|
Высота |
55 |
93 |
76 |
94 |
61 |
104 |
|
|
Масса, кг |
1,75 |
2,4 |
2,1 |
1,2 |
1,3 |
1,3 |
|
|
Встроенная память, Mб |
8192 |
0 |
128 |
256 |
до 2048 |
0 |
|
|
Число каналов слежения |
440 |
72 |
120 |
72 |
216 |
220 |
|
|
Средняя цена, тыс. руб. |
834,1 |
241,3 |
409,2 |
314,6 |
263,6 |
377,1 |
|
Таблица 2.
Подвижные приёмники.
|
Фирма-производитель, название
Основные характеристики |
Trimble R6 4 Radio |
Sokkia GRX2 (GSM+ Radio) |
Topcon Hiper V |
Geomax Zenith 25 Rover |
Javad Triumph-1 Radio |
Altus APS-3u |
|
|
Приём сигналов различных СНС |
GPS |
+ |
+ |
+ |
+ |
+ |
+ |
|
ГЛОНАСС |
оп. |
+ |
+ |
+ |
+ |
+ |
|
|
Galileo |
оп. |
+ |
+ |
+ |
+ |
|
|
|
Интерфейсы связи |
Радиоканал |
+ |
+ |
+ |
+ |
+ |
+ |
|
GSM/GPRS |
+ |
+ |
|
+ |
оп. |
+ |
|
|
Bluetooth |
+ |
+ |
+ |
+ |
+ |
+ |
|
|
USB |
|
|
|
+ |
+ |
|
|
|
RS-232 |
+ |
+ |
+ |
|
+ |
|
|
|
Ethernet |
|
|
|
|
+ |
|
|
|
Точность статич. измерений, мм |
В плане |
3 |
3 |
3 |
3 |
3 |
2 |
|
По высоте |
3,5 |
5 |
5 |
3,5 |
5 |
5 |
|
|
Габариты, мм |
Длина |
190 |
184 |
184 |
198 |
178 |
178 |
|
Ширина |
190 |
184 |
184 |
198 |
178 |
178 |
|
|
Высота |
102 |
95 |
95 |
95 |
96 |
90 |
|
|
Масса, кг |
1,52 |
1,2 |
1,4 |
1,2 |
1,7 |
1,3 |
|
|
Память, Mб или слот карты памяти |
11 |
SD |
SD |
microSD |
до 2048 |
SD |
|
|
Число каналов слежения |
72 |
226 |
226 |
120 |
216 |
136 |
|
|
Средняя цена, тыс. руб. |
479,8 |
291,6 |
364,0 |
427,4 |
345,9 |
378,0 |
|
Выбран комплект оборудования «GeoMax Zenith 10 (GSM+UHF) + Sokkia GRX2», так как оба устройства обладают возможностью приёма-передачи поправок по радиоканалу (без дополнительных опций) и имеют наименьшую стоимость. Совместимость устройств обеспечивается за счёт использования общепринятых для RTK-сетей стандартов кодирования сообщений (CMR2/CMR+, RTCM SC104 версий 2.2, 2.3 и 3.0), модуляции сигнала (FSK) и протоколов передачи данных (FH915/ FH915+).
Обработку результатов измерений также можно осуществить двумя способами. Первый – разработка приложения с использованием современных средств программирования. Второй – применение географических информационных систем (ГИС), возможностей которых вполне достаточно для построения исполнительной схемы. Учитывая факт наличия в свободном доступе бесплатных ГИС-приложений, логично выбрать именно второй вариант. Мы будем использовать Quantum GIS, так как она признана одной из наиболее популярных свободных геоинформационных систем.
Система Quantum GIS позволяет просматривать и накладывать друг на друга векторные и растровые данные в различных форматах и проекциях без преобразования во внутренний или общий формат. Возможно создание и редактирование векторных данных (в том числе с заданием координат), а также их экспорт в разные форматы. Загрузку растровых изображений (карт) можно осуществить с привязкой к координатам [7].
Разработанная методика определения исполнительной схемы заземляющих устройств предлагается впервые и представляет практический интерес для организаций, занимающихся обслуживанием электрических подстанций. Учитывая периодичность контроля состояния заземляющих устройств, можно сделать вывод об актуальности и экономической эффективности данной методики.
Литература
1. Мазуркевич В.Н. Проектирование заземляющих устройств ОРУ электрических станций и подстанций. – Минск: БНТУ, 2012. – 58 с.
2. Крюков В.И. Обслуживание и ремонт электрооборудования подстанций и распределительных устройств. – М.: Высш. шк., 1989. – 367с., ил.
3. СТО 56947007–29.130.15.105–2011. Методические указания по контролю состояния заземляющих устройств электроустановок: стандарт организации ОАО «ФСК ЕЭС». Введ. 14-10-2011. – ОАО «ФСК ЕЭС», 2011. – 75 с.
4. Ворошилов А.П. Спутниковые системы и электронные тахеометры в обеспечении строительных работ: Учебное пособие. – Челябинск: АКСВЕЛЛ, 2007. – 163 с.
5. Бачурин П.Н. Исследование функциональных возможностей спутниковых навигационных систем // Журнал научных публикаций аспирантов и докторантов, 2014, № 3.
6. Дементьев В.Е. Современная геодезическая техника и её применение: Учебное пособие для вузов. – Изд. 2-е. – М.: Академический Проект, 2008. –591 с. – (Фундаментальный учебник).
7. Руководство пользователя QGIS [QGIS User Guide]: Выпуск 1.8.0. от 23-03-2013. – 283 с.
Поступила в редакцию 14.04.2014 г.