Исследование функциональных возможностей спутниковых навигационных систем
Бачурин Павел Николаевич,
студент магистратуры Владимирского государственного университета,
инженер-технолог ОАО «Владимирское производственное объединение «Точмаш».
На сегодняшний день известны три спутниковых навигационных системы (СНС), предлагающих сервис глобального позиционирования: американская NAVSTAR GPS, российская ГЛОНАСС и находящаяся на стадии внедрения Galileo (Европейский союз).
Спутниковые навигационные системы GPS и ГЛОНАСС создавались, исходя из определённых требований, соответствующих их прямому назначению. Подразумевалась их глобальность (GPS – Global Positioning System, Система глобального позиционирования; ГЛОНАСС – Глобальная навигационная спутниковая система); независимость от метеорологических условий, рельефа местности, степени подвижности объекта; непрерывность работы и круглосуточная доступность; помехозащищённость; компактность аппаратуры потребителя и т.д. [1].
В состав любой современной СНС входят три основных сегмента:
- космический сегмент;
- сегмент контроля и управления;
- сегмент потребителей.
Космический сегмент GPS состоит из 24 основных и нескольких резервных навигационных космических аппаратов (НКА), расположенных на шести орбитах, близких к круговым. В плоскости каждой орбиты спутники равномерно разнесены по долготе через 60 градусов, это позволяет одновременно наблюдать четыре и более НКА с любой точки планеты. Период обращения спутников по орбитам составляет 12 часов, средняя высота над поверхностью Земли около 20000 километров.
Полная орбитальная группировка ГЛОНАСС также включает 24 НКА, но в трёх орбитальных плоскостях по 8 спутников в каждой. Период обращения 11 часов 15 минут 44 секунды, высота орбиты над поверхностью Земли 19100 км. Время активной работы НКА на орбите составляет в среднем 3,5 года [2].
Решение о разработке системы Galileo было принято в 2003 г. Европейским космическим агентством. Система предназначена только для гражданского использования в странах Европы, а также в России, Украине, Китае, Израиле, Южной Корее. Запуск первого спутника произведен в декабре 2005 г. с Байконура [3].
Основное назначение НКА – формирование и излучение сигналов, необходимых для решения потребителем задачи позиционирования и контроля исправности самого НКА. Излучаемые НКА сигналы содержат дальномерную и служебную составляющие. Дальномерная составляющая используется потребителями непосредственно для определения навигационных параметров – дальности до НКА, вектора скорости потребителя, его пространственной ориентации и т.п. Служебная составляющая содержит информацию о координатах спутников, шкале времени, векторах скоростей НКА, исправности и т.д.
Определение текущих координат НКА, движущихся с большими и непостоянными относительно потребителя скоростями, представляет собой сложную техническую и вычислительную задачу. При существующем подходе к построению СНС максимально возможный объём вычислений стараются перенести на наземный комплекс управления. Сегмент контроля и управления осуществляет наблюдение за спутниками, принимает навигационные сигналы, производит математическую обработку и вычисление различных координатных и корректирующих данных, подлежащих загрузке в бортовую ЭВМ НКА.
Сегмент потребителя представлен неограниченным множеством приёмников спутникового сигнала, в которых присутствуют радиочастотный тракт, собственно принимающий радиосигналы НКА, и вычислитель, предназначенный для выделения навигационной информации, реализации алгоритма выбора оптимального созвездия спутников, вычисления пространственных координат и вектора скорости потребителя [1].
Как в GPS, так и в ГЛОНАСС координаты потребителя определяются посредством их расчёта по удалённостям от навигационного космического аппарата. Расстояния Di рассчитываются по временным задержкам Ti сигнала на трассе «i-й НКА – потребитель» и известной скорости распространения радиоволн с:
Di = cTi.
Временные задержки Ti измеряются в результате сопоставления принятых псевдослучайных кодов и генерируемых в приёмнике копий этих кодов с учётом априори известных моментов излучений сигналов НКА. При этом могут использоваться также соответствующие измерения разностей фаз несущих частот [4]. Зная расстояния от наземного объекта до трёх и более спутников, координаты которых заранее известны, можно вычислить местоположение этого наземного объекта.
Точностные характеристики полученных координат точек местности зависят от погрешностей измерения времени прохождения сигналом пути НКА – приёмник, погрешностей эфемерид (информация о текущем и прогнозируемом положении спутников), погрешностей шкалы времени, ионосферных и тропосферных влияний, а также от самих приемников, заложенных в них режимов и методов определений [2].
Информационно-аналитический центр координатно-временного и навигационного обеспечения (Россия) проводит еженедельный анализ функциональных характеристик ГЛОНАСС и GPS. На рисунках 1 и 2 показаны графики, иллюстрирующие процесс изменения точности местоопределения в указанных системах. На графиках представлено расчётное значение 95-процентного порога погрешности [5].
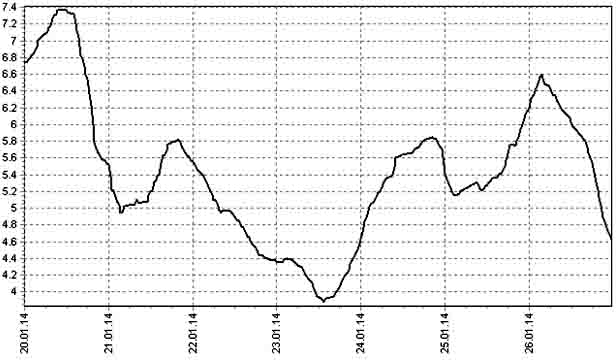
Рис. 1. Погрешность местоопределения системы ГЛОНАСС, м.
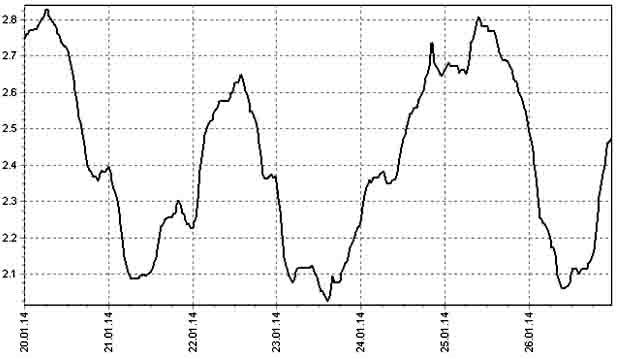
Рис. 2. Погрешность местоопределения системы GPS, м.
По графикам видно, что современные системы глобального позиционирования способны обеспечить точность определения координат потребителя не более двух метров, но в ряде случаев требуется более высокая точность определения. Добиться существенного увеличения точности (до единиц и долей сантиметра) удаётся при помощи функционального дополнения к СНС, называемого дифференциальной подсистемой.
Наиболее известными дифференциальными подсистемами являются: DGPS (Differential Global Positioning System), WAAS (Wide Area Augmentation System), EGNOS (European Geostationary Navigation Overlay Service), WAGE (Wide Area GPS Enhancement), MSAS (Multi-functional Satellite Augmentation System), RTK (Real Time Kinematics) и другие. Как правило, их основу составляют наземные контрольно-корректирующие станции (ККС), координаты которых известны и определены с большой точностью. Устройство пользователя находится сравнительно недалеко от ККС. Путём сравнения измеренных значений дальностей до спутников с достоверными значениями ККС вычисляет поправки и по радиоканалам передаёт пользователям дифференциальной подсистемы [1]. Современный уровень развития систем позиционирования позволяет промышленности выпускать устройства и комплексы, обеспечивающие точность определения координат до 3…5 мм. [6, 7, 8].
Таким образом, спутниковые навигационные системы могут быть использованы как в бытовых целях, так и для решения сложных прикладных задач: в строительстве зданий, дорог, мостов, в геодезии, при наблюдении за перемещениями поверхности земной коры и т.д. Доступность, гибкость и масштабируемость постепенно приводят к тому, что почти все сферы человеческой деятельности в будущем каким-либо образом затронут использование возможностей этих систем.
Литература
1. Яценков В.С. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. – М.: Горячая линия – Телеком, 2005. – 271 с.
2. Ворошилов А.П. Спутниковые системы и электронные тахеометры в обеспечении строительных работ: Учебное пособие. – Челябинск: АКСВЕЛЛ, 2007. – 163 с.
3. Синякин А.К. Физические принципы работы GPS/ГЛОНАСС [Текст]: монография / А.К. Синякин, А.В. Кошелев. – Новосибирск: СГГА, 2009. – 110 с.
4. Соловьёв Ю.А. Системы спутниковой навигации. – М.: Эко-Трендз, 2000. – 269 с.
5. Бюллетень оценки характеристик ГНСС на интервале 20.01.2014 00:00:00 – 27.01.2014 00:00:00. Бюллетень CW № 04/14. – М.: ИАЦ КВНО, 2014. – 107 с.
6. Руководство пользователя GNSS-системы EPOCH 35. – Spectra Precision, США, 2008. – 42 с.
7. Руководство пользователя NET-G3. – Topcon Positioning Systems, Япония, 2006. – 122 с.
8. Руководство пользователя TRIUMPH-1. – JAVAD GNSS, США, 2010. – 110 с.
Поступила в редакцию 25.03.2014 г.