Расчет системы автоматического управления процессом подготовки нефти в трехфазном сепараторе
Зырин Вячеслав Олегович,
кандидат технических наук, ассистент кафедры электротехники, электроэнергетики, электромеханики,
Штыков Александр Александрович,
студент электромеханического факультета.
Национальный минерально-сырьевой университет «Горный».
Основной задачей системы управления является поддержание постоянства технологического процесса в условиях изменения исходных условий, начальных параметров процесса, а также отработка возмущающих воздействий. Важную роль в процессе разработки систем управления занимает расчет параметров устройств управления (регуляторов).
Рассмотрим процесс расчета регуляторов на примере установки подготовки нефти (УПН), осуществляющей подготовку нефти до товарного состояния [1]. Для устойчивой работы установки необходимо обеспечивать: контроль расхода воды Gв, расхода нефтяной эмульсии в секции нагрева и коалесценции Gэм, уровня раздела фаз «нефть-вода» в секции обессоливания hн-в, расхода дымовых газов Gг и уровня раздела фаз «нефть-вода» в секции стабилизации; регулирование температуры стенок жаровых труб секции нагрева, температуры нагрева нефтяной эмульсии, уровня нефти в секции коалесценции.
Каскадная схема системы стабилизации температуры нефти нагрева и коалесценции имеет вид, представленный на рис. 1.
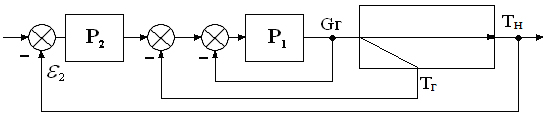
Рис. 1. Каскадная схема системы стабилизации.
Первый контур с регулятором Р1 стабилизирует температуру стенок жаровых труб Тг для предотвращения прогара жаровых труб (повышения температуры стенок выше нормы). Для повышения качества ее работы регулятор Р1 охвачен жесткой ООС по расходу регулирующей среды. Регулятор Р2 стабилизирует температуру нагрева эмульсии Tн.
В качестве Р1 выбран ПИ регулятор, расчет произведен частотным методом, предполагающим поиск оптимальных параметров алгоритма управления из условия минимума интегральной квадратичной ошибки регулирования (1) при скачкообразном характере возмущения [2]:
 (1)
(1)
Метод основан на использовании частотных характеристик ОУ. В основу метода положено представление о том, что минимуму интегрального квадратичного критерия при скачкообразном возмущении по управляющему каналу соответствуют оптимальные параметры ПИ-алгоритма kр и Ти, отвечающие условиям:
![]()
где ![]() - модуль АФХ замкнутой системы, т.е. амплитудно-частотная
характеристика замкнутой системы по задающему воздействию.
- модуль АФХ замкнутой системы, т.е. амплитудно-частотная
характеристика замкнутой системы по задающему воздействию.
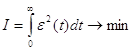
При расчете оптимальных kр и Ти используются следующие соотношения [3]:
где ω -
частота; А(ω) - амплитудно-частотная характеристика (АЧХ) объекта
управления для данной частоты; γ - угол, заключенный между вектором АФХ
объекта управления и отрицательной мнимой полуосью, ![]() ;
;
![]() - фазовая частотная характеристика
(ФЧХ) для этой частоты; М -заданный показатель колебательности.
- фазовая частотная характеристика
(ФЧХ) для этой частоты; М -заданный показатель колебательности.
Максимум отклонения kр/Ти, рассчитанного с помощью (2), соответствует искомым оптимальным параметрам. По существу, вычисление требуемых значений kр/Ти сводится к поиску такого значения ω, при котором это отношение принимает максимальное значение. Для расчета используется часть АФХ ОУ, заключенная в III квадранте. Предельное значение γпред, ограничивающее диапазон частот, для которого нужно проводить расчет, определяется из уравнения
![]()
Решая это уравнение, получаем
gпред = arccos![]()
![]()
Из условия (4) определяется диапазон частот, для которых должен быть проведен расчет.
Для упрощения расчетов ωН и ωК строится ФЧХ объекта и определяются ωН при φ = -900 , ωК при φ = -1420.
Далее определяются А(ω), φ(ω) и γ(ω) для заданной передаточной функции объекта.
В результате расчета на ПК по заданному алгоритму получают оптимальные параметры регулятора: Кропт, Тиопт.
Таким образом, функция оптимально подобранного ПИ-регулятора выглядит следующим образом:
![]()
С учетом жесткой отрицательной обратной связи передаточная функция регулятора стабилизирующего P1 принимает вид:
![]()
В качестве регулятора Р2 принят также ПИ- регулятор. Расчет проведен по сложному эквивалентному объекту, который включает в себя весь внутренний контур и инерционный объект W2.
Передаточная функция эквивалентного объекта:
![]() ,
,
где W2- передаточная функция объекта по каналу температуры нефти.
Параметры регулятора Р2 определяются частотным методом, суть которого изложена выше.
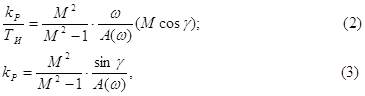
Для проверки расчета строится кривая переходного процесса (рис.2) и по показателям качества делается вывод о правильности выбора параметров регулятора. Как видно из рисунка 3 система имеет удовлетворительные показатели качества (время переходного процесса tП= 34 мин, перерегулирование γ=30%, степень затухания ψ=0,85), что подтверждает правильность расчетов.
Рис. 3. Переходный процесс в контуре стабилизации температуры.
Структурная схема одноконтурной системы САУ системы стабилизации уровня нефти в секции стабилизации и отбора представлена на рис.4.
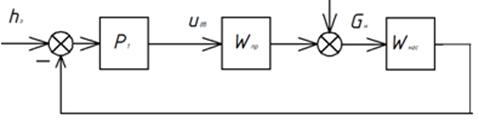
Рис. 4.
Структурная схема одноконтурной системы САУ, где ![]() -
секция окончательной коалесценции и нагрева,
-
секция окончательной коалесценции и нагрева, ![]() -
система управления электроприводом насоса.
-
система управления электроприводом насоса.
Объект
регулирования в системе управления, представленной на рис. 4 - секция
окончательной коалесценции и отбора нефти, а его выходной параметр – уровень
нефти h, который необходимо поддерживать постоянным путем изменения
производительности ![]() насоса Н. Возмущающее
воздействие в этой системе – приток нефти
насоса Н. Возмущающее
воздействие в этой системе – приток нефти ![]() . Дифференциальное
уравнение такого объекта имеет вид:
. Дифференциальное
уравнение такого объекта имеет вид: ![]() , где
, где ![]() – скорость изменения уровня нефти в НГС,
м/с;
– скорость изменения уровня нефти в НГС,
м/с; ![]() - приток нефти, м3/с;
- приток нефти, м3/с; ![]() - передаточный коэффициент объекта (F –
площадь НГС, м2);
- передаточный коэффициент объекта (F –
площадь НГС, м2); ![]() -производительность
насоса, м3/с.
-производительность
насоса, м3/с.
Следовательно, объект представляет собой астатическое звено первого порядка, передаточная функция которого имеет вид:
![]()
Приняв ![]() , рассчитывается площадь НГС:
, рассчитывается площадь НГС:![]() .
.
В результате
передаточная функция будет иметь вид : ![]()
По переходному процессу расхода нефти насосного агрегата получают передаточную функцию вида:
![]() ,
,
В результате передаточная функция эквивалентного объекта, для которого нужно выбрать регулятор имеет вид:
![]()
Т.к. объект
интегральный, то целесообразно выбрать пропорциональный регулятор ![]() .
.
Настройку этого регулятора определяют с помощью графического метода Ротача [3].
Таким образом, на основании кривых переходных процессов можно судить о правильности расчета параметров регуляторов системы управления, и соответственно, о выполнении предъявляемых к системе управления требований.
Литература
1. Слюсарев Н.И. Основы разработки нефтяных месторождений. – СПб.: СПГГИ, 2004.
2. Теория автоматического управления. Синтез систем автоматического объектами горного и нефтегазового производства. Методические указания к курсовой работе. – СПб.: СПГГИ, 2010, 58с.
3. Ротач В.Я., Шавров А.В., Бутырев В.Н. Синтез алгоритмов машинного расчета оптимальных параметров систем регулирования // Теплоэнергетика. 1987. № 12 С. 76-79.
Поступила в редакцию 27.04.2015 г.