Автоматизированная система управления плотностью движения магистрали
Абдул Салаам Авад Кадхим Ал Хазражи,
университет Гармиан, Ирак.
Automated highway System with Traffic Density Control
Dr. Abdul Salam. A. Al-Khazraji,
Fac. of Education – University of Garmian, Kurdistan Region – Iraq.
On the macroscopic level a roadway controller calculates the desired speed Commands to be followed by vehicles in each section of the freeway lanes in order to achieve desired traffic density distribution that lead to optimum traffic flow conditions.
In this paper we deign, analyze & simulate a roadway Controller for an automated highway that achieves desired traffic densities along the lane.
A macroscopic traffic flow model that is modified for (AHS) operation is used for control design & analysis.
We show that the proposed roadway controlled guarantees exponential convergence of the traffic density at each section to the desired density. Simulation results are used to illustrate the effectiveness of the proposed controller & the significant benefits (AHS) may bring to traffic flow.
Keywords: Macroscopic traffic flow: roadway controller: traffic flow density control: automated highway systems.
1. Traffic Flow Model
The analogy between traffic flow and fluid flow formed the basis for the first traffic flow model.
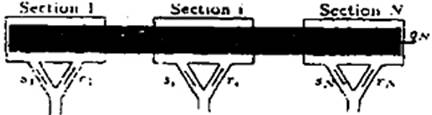
Fig. 1.
Consider
a single freeway lane, which is subdivided into N sections with lengths ![]() , as shown in Fig. 1.
, as shown in Fig. 1.
The space- and time-discretized traffic flow model for a segment of the lane involves the following variables:
![]() density in section i at time nT
(in vehicles per kilometer per lane), where
density in section i at time nT
(in vehicles per kilometer per lane), where ![]()
![]() space mean speed of vehicles in section
I, at time nT (
space mean speed of vehicles in section
I, at time nT (![]()
![]() traffic volume leaving section i,
entering section
traffic volume leaving section i,
entering section ![]() at time nT (in vehicles per hour);
at time nT (in vehicles per hour);
![]() on-ramp traffic volume for section i
(in vehicles per hour);
on-ramp traffic volume for section i
(in vehicles per hour);
![]() off-ramp traffic volume for
section i (in vehicles per hour):
off-ramp traffic volume for
section i (in vehicles per hour):
![]() length of ith section (in km);
length of ith section (in km);
T time-discretization step size (in h).
The modified freeway traffic flow model given in Karaaslan et al. (1990) is in the following form:
|
|
..……….. |
![]()
|
|
………….. |
![]() {
{![]()
![]()
|
|
……….. |
Where
 ,
,
Here ![]() and
and ![]() are positive constants
with
are positive constants
with ![]() , and kjam
is the maximum possible density. The variable
, and kjam
is the maximum possible density. The variable ![]() in (3) represents the
density-dependent equilibrium speed. In a manual operating environment with
homogeneous traffic conditions. this relationship has been characterized in
Papageor. giou (1989) and Papageorgiou ei al (1990a, b) as
in (3) represents the
density-dependent equilibrium speed. In a manual operating environment with
homogeneous traffic conditions. this relationship has been characterized in
Papageor. giou (1989) and Papageorgiou ei al (1990a, b) as
|
|
…………..
|
where ![]() and
and ![]() arc real-valued parameters,
and Vt, is the free speed, which can be estimated from
traffic data.
arc real-valued parameters,
and Vt, is the free speed, which can be estimated from
traffic data.
The term ![]() in (3) under manual
operation depends on the downstream density, and can be expressed as
in (3) under manual
operation depends on the downstream density, and can be expressed as
|
|
………………………
|
where the positive constant K is introduced to prevent abnormal growth of the velocity for section i when its density is very low,
Typical parameter values associated with the above model are given in Table 1.
2. Boundary conditions
We assume that the traffic flow rate entering section 1 during the
time period nT and ![]() is
is ![]() and the mean speed of
the traffic entering section 1 is equal to the mean speed of section
and the mean speed of
the traffic entering section 1 is equal to the mean speed of section ![]() In addition, we also assume that the mean speed and traffic density
of the traffic exiting section N + 1 are equal to those of section
In addition, we also assume that the mean speed and traffic density
of the traffic exiting section N + 1 are equal to those of section ![]() Hence the boundary
conditions for the entrance and exit can be summarized as follows:
Hence the boundary
conditions for the entrance and exit can be summarized as follows:
|
|
…………………(6) |
|
|
…………………(7) |
|
|
………………….(8) |
|
|
…………………..(9) |
The physical meaning of each term of (3) that influences the mean speed of a section can be interpreted as follows (Papageorgiou, 1983, Karaaslan et aL, 1990).
Thc second term, ![]() is the relaxation term, which accounts for the evolution of the mean
speed
is the relaxation term, which accounts for the evolution of the mean
speed ![]() towards its density
dependent equilibrium :speed
towards its density
dependent equilibrium :speed ![]() with a time
constant
with a time
constant ![]() The dependence of
The dependence of ![]() on the density is
influenced by the environment in which the traffic flow is operating For manual
operation, this relationship is governed by (4), as reported in
Papageorgiou (1989) and Papageorgiou et al (1990 a.b). For an AHS
operating under homogeneous heavy traffic conditions, the adopted safety policy
for vehicles defines this relationship. For instance, if the desired safety
distance between two vehicles Sa is made to depend on the equilibrium
velocity
on the density is
influenced by the environment in which the traffic flow is operating For manual
operation, this relationship is governed by (4), as reported in
Papageorgiou (1989) and Papageorgiou et al (1990 a.b). For an AHS
operating under homogeneous heavy traffic conditions, the adopted safety policy
for vehicles defines this relationship. For instance, if the desired safety
distance between two vehicles Sa is made to depend on the equilibrium
velocity ![]()
![]()
then the density equilibrium speed relationship can he characterized by
|
|
…………………
|
Where ![]() is the inverse function
of
is the inverse function
of ![]() satisfies the equation
satisfies the equation ![]() If the constant-time
headway policy is adopted for selecting the inter vehicle spacing then.
If the constant-time
headway policy is adopted for selecting the inter vehicle spacing then.
![]()
where h and c are constants. It follows that
![]()
The third term
![]()
in (3) is the convection term. It represents the influence of the incoming traffic on the mean speed evolution in segment i.
The last term, -![]() in (3) is the anticipation term. For manual driving, human drivers in general
increase or decrease vehicle speed, depending on the traffic density
downstream. In other words, for manual driving, the anticipation term reflects
the effect of downstream traffic density on the mean speed evolution in section
i at sampling time nT. For instance, if the density downstream is
lower. this term reflects the tendency of human drivers to increase vehicle
speed. More specifically, the anticipation term represents the microscopic
traffic dynamics that describes the interaction between vehicles or vehicles'
response to the down stream's traffic conditions: For AHS, the anticipation
term no longer represents the tendency of the human driver's response to the down
stream's traffic conditions. Instead, It represents the microscopic traffic
dynamics governed by the AHS control system.
in (3) is the anticipation term. For manual driving, human drivers in general
increase or decrease vehicle speed, depending on the traffic density
downstream. In other words, for manual driving, the anticipation term reflects
the effect of downstream traffic density on the mean speed evolution in section
i at sampling time nT. For instance, if the density downstream is
lower. this term reflects the tendency of human drivers to increase vehicle
speed. More specifically, the anticipation term represents the microscopic
traffic dynamics that describes the interaction between vehicles or vehicles'
response to the down stream's traffic conditions: For AHS, the anticipation
term no longer represents the tendency of the human driver's response to the down
stream's traffic conditions. Instead, It represents the microscopic traffic
dynamics governed by the AHS control system.
Table 1.
Parameters associated with the traffic model.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
93.1 |
110 |
1.86 |
4.05 |
0.95 |
40 |
4 |
12 |
6 |
120 |
35 |
20.5s |
|
Km/h |
Vehicles Km-1 lane-1 |
|
|
|
Vehicles Km-1 lane-1 |
Vehicles Km-1 lane-1 |
Km2 lanc-1 |
Km2 lanc-1 |
Vehicles Km-1 lane-1 |
Vehicles Km-1 lane-1 |
|
The complete traffic model under manual operation is described by (1)-(4), with w(n) defined in (5)‑
The dynamics of traffic flow in AHS are still described by (1) -(3), but the adopted safety policy that defines the equilibrium speed-density relationship (10) replaces (4). Furthermore, the designed control law u(n) replaces the last term in (3). The complete behavior of traffic flow in AIIS is governed by the following equations:
|
|
………. |
![]()
|
|
………. |
![]()
![]()
|
|
………. |
|
|
|
Here
![]() are positive constants, with
are positive constants, with ![]() is the inverse function of the
adopted safety policy
is the inverse function of the
adopted safety policy ![]() .
.
3. Problem Statement
Traffic congestion in urban freeways is caused by ad hoc velocities and headway's that humans choose when they operate their vehicles. Therefore any strategy that hopes to reduce congestion needs to remove this human subjective element and replace it with a method that directly controls the density and speed of vehicles by
prescribing speed commands to vehicles in each section of the highway.
Assume that the roadway has the capability of measuring mean speeds and traffic densities at each section of a lane. The goal of traffic management is to assess the state of the traffic and provide appropriate speed commands to the vehicles at various sections of the lane in order to maintain a desired traffic density profile that under the current traffic conditions corresponds to some optimum traffic flow situation. A roadway controller can he designed to perform this task. The speed commands should be generated so that the desired traffic flow rate can be achieved and the density distribution along the lane leads to a homogeneous traffic flow.
Consider a lane subdivided into N sections with lengths L,, i = 1, ... N. as shown in Fig. 1. The traffic now rate entering section 1 at sampling time nT is qo(n) vehicles per hour. The desired traffic density for section f of a single lane is assumed to be kd(n).
Our objective is to choose a proper value of u,(n) for section r
such that the traffic density of section i converges to the desired traffic
density kw(n) exponentially fast, i.e k1(n)+kd (n)
as ![]() .
.
4. A Roadway Traffic Density Controller
In this section, we propose a microscope roadway traffic density controller for AHS. Our design uses integrator back stepping to realize the control law needed to track a desired density profile The following general lemma Is used ,n
the design and analysis of the proposed roadway controller.
Lemma 1. Consider the following discrete-lime system:
![]()
where
c is a constant and ![]() exponentially implies z(n)-.0 exponentially.
exponentially implies z(n)-.0 exponentially.
Proof. This is trivial and is omitted.
The main idea of the controller design is to apply back stepping and use Lemma 1 over and over again. That is, we treat v1(n) as a free variable in (12) to control the density k1(n + 1) at the next time point. Then the desired control action of u1(n) is achieved by designing the control input v1(n) utilizing (13).
The control design consists of three steps.
Step 1. We begin out design by defining the tracking error for section f as
![]()
Then, with (12), it follows that
![]()
![]()
![]()
|
|
…… |
|
|
…… |
Where
![]()
![]()
From
Lemma 1, we have ![]() and
and ![]() as
as ![]() . The goal of the next step is to choose
the control input
. The goal of the next step is to choose
the control input ![]() that guarantees
that guarantees ![]() as
as ![]()
Step 2. From
the definition of ![]() and (II), we have
and (II), we have
![]()
![]()
|
|
……. |
To simplify the notation, we define
|
|
……. |
|
|
…….. |
|
|
…….. |
![]()
|
|
……. |
We have from (12) and (15) that
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Therefore.
the quantities ![]()
![]() are available at sampling time nT. To stress this
fact, we define
are available at sampling time nT. To stress this
fact, we define
![]()
|
|
……. |
![]()
![]()
Substituting out definitions (18)-(21) into (17). we obtain the compact form
![]()
|
|
……. |
Then, with (22), it follows that
![]()
![]()
![]()
![]()
|
|
…… |
We
now consider the dynamics of this equation for the entrance ![]() . exit
. exit ![]() and intermediate sections
and intermediate sections ![]() of the freeway lane. Let us first define
of the freeway lane. Let us first define
![]()
![]()
|
|
……. |
Than, using (13) and (25) , we have
|
|
…….. |
Case
![]() for intermediate
freeway sections. Using
(24) and (26). we have
for intermediate
freeway sections. Using
(24) and (26). we have
![]()
![]()
![]()
![]() …..…… (27)
…..…… (27)
Where
![]() …… (28)
…… (28)
Therefore
is we choose the control signal ![]() to satisfy
to satisfy
![]()
|
|
|
And
choose ![]() application of Lemma 1 to (27), we have
application of Lemma 1 to (27), we have
![]()
Case
![]() entrance. Using
the boundary condition (7) in (24). we have
entrance. Using
the boundary condition (7) in (24). we have
![]()
|
|
|
Substituting for a1(n) and b1(n) from (22). (18) and (19) in this equation and using the boundary condition (6), we have
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ...
...![]()
Where
![]()
|
|
………… |
Therefore if we choose the control u,(n) to satisfy
|
|
|
then,
by applying Lemma 1 to (31), we have ![]()
Case
![]() for freeway exit. Using
the boundary condition (9) in (24). we have
for freeway exit. Using
the boundary condition (9) in (24). we have
![]()
|
|
|
Substituting for bn(n) and cn(n) from (22), and (19) and (20) in this equation and using the boundary condition (8), we have
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
(35) |
Where
|
|
(36) |
Therefore
is we choose the control ![]() to satisfy
to satisfy
|
|
(37) |
then,
by applying Lemma 1 to (35), we have ![]()
Step 3. To obtain the control law u,(n), i = 1, 2, . N from (29), (33) and (37), we need to solve the algebraic equation
|
|
(38) |
Where
|
|
(39) |
||
|
|
(40) |
|
|
and![]()
![]()
![]()
We
define two constants ![]() , and
, and ![]() where
where
|
|
(41) |
|
|
(42) |
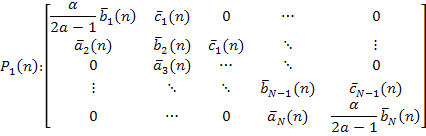
Substituting (41) and (42) into the tridiagonal matrix equation (38) yields
|
|
(43) |
|
Where |
(44) |
The uniqueness of the solution of (43) depends on the non-singularity of P(n). which in turn can be guaranteed if
![]()
for some constant.
To ensure satisfaction of this condition, we make the following assumption for each section of the freeway lane at any sampling time.
Assumption 2. (Traffic flow
controllability). There exists a small positive constant such
that ![]() , n,
, n,
![]()
![]()
![]()
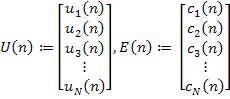
Theorem 3 Assume that the traffic flow controllability stated in Assumption S is satisfied for each section at any sampling time. Leta be a positive constant defined as in Table I. Let P(n), U(n) and E(n) be as defined in (44) in (40). Then there exist control inputs u,(n) satisfying
|
|
(45) |
that drive the traffic density k,(n) for section i,i = 1, 2, .... N to the desired traffic density k4(n) exponentially fast.
Proof. We showed in Step 3 that the desired control taw must satisfy the matrix equation (45). This provides the solution of the algebraic equations (29), (33) and (37) in Step 2. Application of Lemma 1 along with this solution to (27). (31) and (35) yields
![]() as
as ![]() The use of
the same lemma with (16) ensures that
The use of
the same lemma with (16) ensures that ![]()
![]() Hence
Hence ![]() we have
we have ![]() exponentially.
exponentially.
Theorem 3 provides the control strategy needed for tracking a desired density profile. According to this theorem and (13), if u,(n) is chosen as (45), the average velocity in each section i of the lane at sampling time (n + 1)T will be
|
|
(46) |

and the traffic density at section t converges to the desired traffic density k4 exponentially.
Consider a long segment of freeway, which is divided into 12 sections. The length of each section is 500 at. The initial traffic volume entering section 1 is assumed to be 1500 vehicles per hour. The initial density and mean speed of each section are as shown in Table 2.
Four cases are considered. In the first, shown in Figs 2 and 3, no feedback from the roadway is applied, and therefore u,(n) is replaced with the corresponding term in (3). From these figures, we see the propagation of congestion upstream due to the initial traffic congestion in sections 6-8, which eventually causes a traffic jam.
![]() Table
2.
Table
2.
Initial densities and velocities of single lane freeway.
|
Section |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Initial densities (vehicles km-1lane-1) |
18 |
18 |
18 |
18 |
18 |
52 |
52 |
52 |
18 |
18 |
18 |
18 |
|
Initial velocity (k mh-1) |
81 |
81 |
81 |
81 |
81 |
29 |
29 |
29 |
81 |
81 |
81 |
81 |
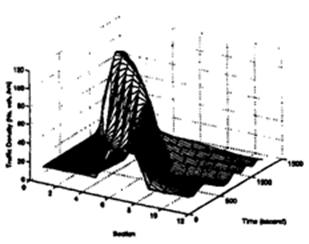
Fig. 2. Density profile without control.
In the second and third cases, we use the proposed controller to achieve desired traffic densities of 23 and 35 vehicles per kilometer respectively. The simulation results shown in Figs 4-9 demonstrate that the initial congested conditions are quickly dampened out by the proposed controller, and the traffic flow is regulated to achieve the desired traffic densities.
In the fourth case, we assume that the input traffic flow rate in section 1 increases exponentially from 1503 to 2000 vehicles per hour as shown in Fig. 10. We set the desired traffic density for this cast to 23 vehicles per kilometer. The simulation results shown in Fig. 11 show that the desired traffic density is achieved exponentially with the proposed road-way controller.
6. Conclusions
In this paper, we have considered the use of feedback for controlling traffic flow on the macroscopic level in an AHS environment. We have considered the design and analysis of such a roadway controller using a macroscopic traffic.
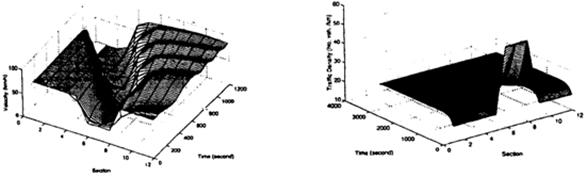
Fig. 3. Velocity profile without control. Fig. 4. Density profile desired density
is 23 vehicles per kilometer.
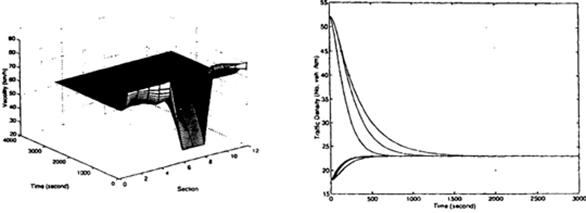
Fig. 5. Velocity profile desired density is 23 Fig. 6. Density in each section desired
vehicles per kilometer. density is 23 vehicles per kilometer.
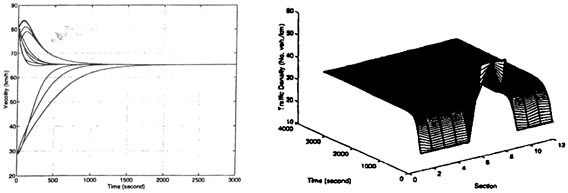
Fig. 7. Velocity in each section desired density Fig 8. Velocity profile desired density
is 23 vehicles per Kilometer. is 23 vehicles per kilometer.
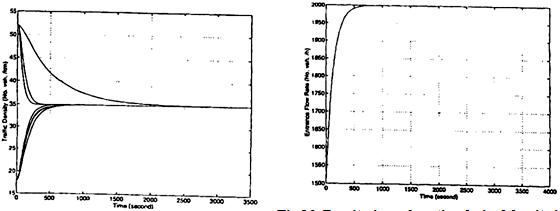
Fig. 9. Density profile desired density Fig. 10. Density in each section desired density
is 23 vehicles per kilometer. is 23 vehicles per kilometer.
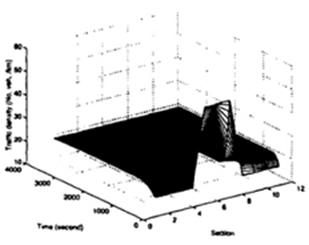
Fig. 11. Increasing entrance flow rate.
Flow model that is modified for AHS. The proposed controller has been shown to guarantee exponential convergence of the traffic density to the desired one. Simulations have been used to demonstrate that an initial density disturbance can cause instability, which manifests itself as congestion in the absence of feedback control. The use of the proposed roadway controller demonstrates that such instability can be counteracted and congestion can be avoided.
References
1. Chien. C.C. and Iosnnou. P. (1992) Automatic vehicle following_ In Pox American Control Cont Chicago. IL. pp 1768-1752.
2. Chien. C. C. Iosnnou. P. and Chu. C. X. 11995) Fuzzy traffic density homogeneizer for automated highway sysleml Submitted to IEEE Fran,. Etta. Syr.
3. Creme.. M. and May. A. D. (1985) An encoded traffic model lac free.-ay control. Research Report 15CB.ITSRR-35 7.
4. Greenlee T L and Payne. H. J. (1977) Freeway ramp metering strategies for responding to incident+ In Pro (FEE conf on Decision and Control. pp. 982 .987 .
5. Hcdrkk, J.K., McMahon. D, Narendran, V. end Swartoop, D (1991) Longitudinal vehicle controller design for 1VHS .pre system in proc American Cont. (Coot, Boston, MA. pp. 3107-3112.
6. loannou, P and Chinn. C C. (1993) Autonomous Vnldligenl cruise control IEEE Tram Vrhfealar Trehnol 42, 657-672.
7. Ioennou, P.. Ahmcd.7 id, F. and Wuh. D. 09971 A time headway autonomous intnlhgen cruise design and simulation Technical Report l,ISC..SCT 9211.
8. K araselen, U. V.ratya, P and Walrand, J. (1990) Two propoula to improve freeway traf5c-1low Preprint.
9. Li1hlhill, M. J. and Whitham, G. B (1955) On kinematic waves ii: A theory of traffic flow on long crowded roads. Pros R Soc Lend. A229, 317-345.
10. Papsgemgiou. M (1983) Apphcarionr of Automatic Control Conceper ro Traffic now Madding and ConrroL Springer-Vedag, Berlin.
11. Pspegeorgiou. M. (1986) Freeway on ramp control strategies: overview, discussion and possible application to Boulenard Peipherique in Paris. Internal Report 1NRETS. Aroued, France.
12. Papegeorgiou. M. Blosseville, 1. M. and Hadj-5alem, II. (1989) Macroscopic modeling of traffic flow on the Boulevard Periphorique in Paris. Traupon Re,. 13B, 29-47.
13. Papageorge.. M, Blossevik. I. M. and Hadj-Salem, H. (1999a) Modeling and real time control on traffic flow on the southern part of Boulevard Periptrorique in Paris Part 1, Modeling. Transport Rel. 24A, 345-359.
14. Papagcorgiou, M.. Blosaeville, J. M. and Haji-Salem. H. (1990b) Modeling and redaimc control of Traffic flow on the southern pan of Boulevard Peripherique in Paris. Pus II, Coordinated on-ramp metering. Transport Res. 24A. 361-370.
15. Payne. H. J. (1971) Models of freeway traffic and cynitol. In Mathematical Models of Public Syarrnro. Simulation Council Proceeding, pp. 51-61.
16. Payne, It, I. (1979) A Critical Preview of Microscope Freeway Model in Proc, Engineering Foundorlon Coif on Rnroreh Di.ecrrons in Computer Control of Urban Traffic 5y...no. pp. 251-265.
17. Payne, H. 1.. Meisel. W. S and Teener, M D (1973). Ramp control to relive freeway congestion caused by traffic dislurhancealot. 1. Control 19, 52-64.
18. Rao. P. S. Y., Vara.ye. P. and Eskan, F. (1992). Investiganons into achievable capecitks end strum stability .irh coordinated intelligent vehklea. PATH Technical Report.
19. Sheikholeslam, S (1991) Control of a class of interconnected nonlinear dynamical system: the platoon problem Ph.D. dissociation. University of California, Berkeley.
20. Shcikholeslam. S. and Desoer, C. A. (1991). A splcm level study of the longutidinal control of a platoon of "bides. ASME TDYn Syst., Meas , Control 114, 286-292.
21. Shlodovcr, S. F.. (1991) Longitudinal Control of Automotive vehicles in Close-formation platoons. ASME I. Dya Sys.. Mono., Control 113, 231-241.
22. Shladover, S E., Desoer. C A., Hedrick). K., Tomizoka, M Walrand, J. Z. Hang, W. B.. McMahon, D., Sheikholelslam. S.. Peng. H. and McKeown, N. (1991) Automatic vehicle control developments in the path pogrom. IEEE Trans. Vehicular Techno 114-130.
23. Slotaky, A., Chico, C C and loannou, P. (1994) Robust platoon. stable controller design (or autonomous intelligent "Vehicle. In Proc. 33rd IEEE Conf. on Decirion and Comm'. Lake Buena Vista, Fl„ pp. 2431-2436.
24. Swaroop, D.. Chien, C. C., foannoo. P. and Hedrick, J. K. (1994). A comparison of sparing and headway control laws for Atomically Controlled vehicle. I. Vehicle 5pr. Dyer. 238.597-623.
25. Yuanand, L 5. and Kreer, J. B. (1968) An optimal control Algorithm for romp metering of urban freeways In Proc. (6th IEEE Annual Allerton Coot Circular and System Theory, University of Illinois, Allerton. IL.
Поступила в редакцию 21.09.2015 г.